HEX RC Multi-Achsen-Robotersteuerung
Der HEX RC von Aerotech ist ein leistungsstarker 6-Achsen-Bewegungscontroller, der sich ideal für die Steuerung von Robotersystemen wie Hexapods eignet. Der HEX RC ist 4 HE hoch, rack-montierbar und kompatibel mit der A3200-Motion-Plattform. Ein Hochleistungsprozessor sorgt für die intensive Rechenleistung, die erforderlich ist, um bis zu 32 Achsen zu betreiben, komplexe, synchronisierte Bewegungsbahnen auszuführen, E/A zu manipulieren und Daten mit hoher Geschwindigkeit zu erfassen.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Gestaltungsmerkmale
- 4U hohe, rackmontierte Sechs-Achsen-Steuerung für bürstenbehaftete, bürstenlose und Schrittmotoren
- Ideal für die Steuerung von sechsachsigen Robotersystemen wie Hexapods
- Die verteilte Echtzeit-Steuerungsarchitektur A3200 ermöglicht synchronisierte Bewegungen auf bis zu 32 Achsen
- FireWire® oder ASCII-Befehlsschnittstelle über TCP/IP
- Optional integrierte Encoder-Multiplikatoren für hochauflösende Positionierung und reduzierte Integrationskomplexität
- Teilgeschwindigkeits-Positionssynchronisierter Ausgang (PSO)
- Optionaler Sechs-Achsen-Jog-Pendant
- CE zugelassen, NRTL Sicherheitszertifizierung, EU 2015/863 RoHS 3 Richtlinie
- Programmieren in nativem RS-274 G-Code, AeroBasic-Befehlssatz, C, C++/CLI, .NET, MATLAB® oder LabVIEW® für höchste Programmierflexibilität
Leistungsfähige Steuerungsarchitektur
Der HEX RC verfügt über 6-achsige Antriebe, die jede Kombination von bürstenbehafteten, bürstenlosen oder Schrittmotoren steuern können. Der HEX RC schließt sowohl die Stromschleife als auch die Servoschleife digital, um ein Höchstmaß an Positioniergenauigkeit und Leistung zu gewährleisten. Mit der dezentralen Steuerungsarchitektur des A3200 kann der HEX RC bis zu 26 zusätzliche Achsen von Servo-, Schritt- oder Piezotischen anschließen und steuern.
>Schnittstelle und Designoptionen
Der HEX RC ist mit einer ASCII-Befehlsschnittstelle über TCP/IP für die Steuerung in Anwendungen wie z. B. Beamlines ausgelegt. Alternativ kann der HEX RC als Master-Controller fungieren und andere externe A3200-Antriebe über die FireWire-Schnittstelle steuern.
Der HEX RC akzeptiert verstärkte Sinus- oder digitale Encoder. Mit optionalen integrierten Encoder-Multiplikatoren bis zu X4096 ist eine hochauflösende Positionierung gewährleistet.
Ein optionaler 6-Achsen-Jog-Pendel ermöglicht eine einfache, manuelle Steuerung des Positioniersystems. Für sicherheitskritische Anwendungen kann eine Not-Aus-Option mit redundanten Sicherheitsrelais hinzugefügt werden.
Flexible Programmierumgebung
Aerotechs A3200 konzentriert sich auf die Benutzerfreundlichkeit für den Programmierer, verkürzt die Entwicklungszeit im Vergleich zu anderen Tools und bietet die Flexibilität, die dem Programmierer am vertrautesten Tools oder Controller zu verwenden. Eine vollständige integrierte Entwicklungsumgebung und eine umfassende .NET Motion-Bibliothek bieten Klassen für Bewegung, E/A, Status- und Diagnoseinformationen. Programmieren Sie in Visual Studio und verwenden Sie die .NET-Bibliothek, oder verwenden Sie den Motion Composer (IDE), um Code mit AeroBasic™-Befehlen oder G-Code zu entwickeln. Für NI-Anwender steht eine LabVIEW® VI-Bibliothek zur Verfügung, während für Anwender von Visual Basic, C++ oder C eine vollständige C-Bibliothek verfügbar ist.
Das HEX Gen Programmierhandbuch finden Sie hier.
Specfications |
|
| Processor | Intel i7 multi-core processor, 8 GB memory |
| Number of Axes | Six |
| Encoder Inputs | Six (1 Vpp or TTL) |
| Motor Style | Brush, Brushless, Stepper |
| Power Supply | Single-Phase 100-240 VAC; 50/60 Hz (Factory Configured) |
| Power Output | 600 W Continuous |
| Bus Voltage | 80 VDC |
| Peak Output Current (1 sec)(1) | 10 Apk |
| Continuous Output Current(1) | 5 Apk |
| Digital Inputs | 16; Opto-Isolated |
| Digital Outputs | 16; Opto-Isolated |
| Analog Inputs | Eight Total; ±10 V; 12-Bit Differential One on Each I/O Connector; One on Each Axis Connector |
| Analog Outputs | Two; ±5 V; 16-Bit |
| High-Speed Data Capture | Yes (50 ns Latency) |
| Emergency Stop (ESTOP) | Optional |
| Primary Encoder Input Frequency (1 Vpp) | 200 kHz Sine Wave |
| Primary Encoder Input Frequency (TTL) | 10 MHz Square Wave/40 MHz Count Rate |
| Interfaces | ASCII Command Interface via TCP/IP; FireWire® |
| Fieldbus | Modbus TCP on PC |
| USB Ports | Three; Used for Peripheral Device Connection; Two USB 3.0; One USB 2.0 |
| Video Port | One; DVI-I |
| Jog Pendant | Optional; Six-Axis |
| Encoder Multiplication | Optional; x4096 |
| Position Synchronized Output (PSO) | Standard:
Optional:
|
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 8 kHz |
| Power Amplifier Bandwidth | Selectable Through Software |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 50°C |
| Storage Temperature | -30 to 85°C |
| Weight | 25 kg |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
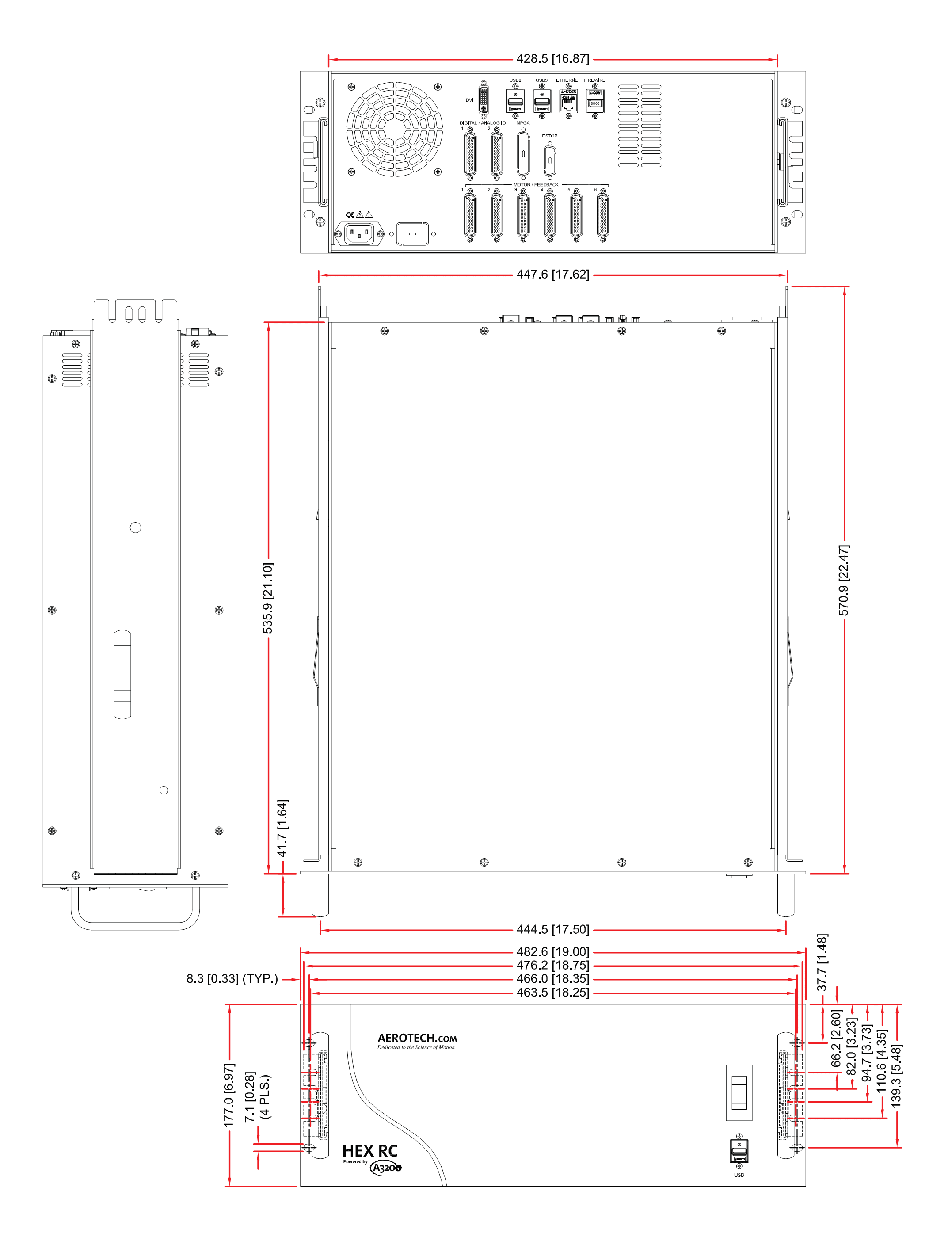
Dimensions
HEX RC
Ordering Information
HEX RC Multi-Axis Robotic Controller
| Option | Description |
| HEX RC | Rack-mount, six-axis, robotic controller with FireWire® with TCP/IP ASCII interfaces; 100-240 VAC single-phase power supply. Includes: - Intel i7 multi-core processor, 8 GB memory - Supports brush, brushless, or stepper motor types - 5 A continuous/10 A peak current per axis - 16 digital I/O, eight analog outputs, two analog inputs - Single-axis position synchronized output (PSO) |
Line Voltage (Required)
| Option | Description |
| -A | 115 VAC line |
| -B | 230 VAC line |
| -C | 100 VAC line |
| -D | 200 VAC line |
Feedback and Jog Pendant Configuration (Required)
| Option | Description |
| -FC1 | Standard TTL encoder feedback |
| -FC2 | Amplified sine encoder feedback with programmable encoder multiplier up to x4096 |
| -FC3 | Standard TTL encoder feedback and connector interface for 6-axis jog pendant (MPG). Jog-pendant must be ordered as separate line item. |
| -FC4 | Amplified sine encoder feedback with programmable encoder multiplier up to x4096 and connector interface for 6-axis jog pendant (MPG). Jog pendant must be ordered as separate line item. |
Line Cord (Optional)
| Option | Description |
| -LC1 | US 115 VAC line cord |
| -LC2 | US 230 VAC line cord |
| -LC3 | UK compatible line cord |
| -LC4 | German compatible line cord |
| -LC5 | Israel compatible line cord |
| -LC6 | India compatible line cord |
| -LC7 | Australian compatible line cord |
PSO
| Option | Description |
| -PSO1 | One-axis PSO (default) |
| -PSO2 | Two-axis Part-Speed PSO |
| -PSO3 | Three-axis Part-Speed PSO |
Options (Optional)
| Option | Description |
| -EST3 | ESTOP3 – controller stops motion, then disables servo control; internal positive guided relays with monitor contact disconnect AC power source from motor (uses two relays for redundancy); contains one-second bus discharge resistors; operator risk assessment is the responsibility of the end user or integrator |
| -SL1 | Rack-mount slides |
Accessories (Ordered as Separate Line Items)
| Option | Description |
| MPG | Six-axis jog pendant |