Soloist HLe Controller and Linear Digital Drive
Nicht empfohlen für neue Designs. Siehe die neue Automation1-iXL5e. Die Soloist® Linear-Serie sind einachsige Servoregler, die eine Stromversorgung, einen Verstärker und einen Positionsregler in einem einzigen Gehäuse vereinen. Der Soloist kann bis zu fünf Tasks gleichzeitig steuern, Variablen handhaben und E/A verwalten, wodurch er sich gut für anspruchsvolle Produktionsanwendungen eignet. Für rauscharme und besonders leistungsfähige Anwendungen ist der Soloist HLe mit linearer Endstufe erhältlich.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Gestaltungsmerkmale
- Einachsiger digitaler Servocontroller mit integrierter Stromversorgung und Verstärker
- Erweiterte Software-Architektur verkürzt die Entwicklungszeit beim Kunden; Verwendung von C#, VB.Net, C und LabVIEW in Kombination mit unserer vollständigen IDE und dem Multitasking-Betriebssystem
- Betrieb im Host-Modus ermöglicht das Senden von Befehlen mit Ihrem PC über Ethernet oder USB zur sofortigen Ausführung
- Ethernet oder USB erlaubt vernetzte Solisten für den Fernzugriff
- Ideal für einfache Anwendungen mit minimaler Einrichtung oder komplexe Anwendungen, die die volle Flexibilität und Skalierbarkeit nutzen
- Positioniersteuerung für bürstenlose, DC-Bürsten- oder Schrittmotoren
- Linearer Verstärker für rauscharme, ultra-leistungsfähige Anwendungen
- CE zugelassen, NRTL Sicherheitszertifizierung, EU 2015/863 RoHS 3 Richtlinie
- Allen-Bradley EtherNet/IP-Schnittstelle bietet volle Integration mit dem Soloist; Programmierung des Soloist direkt aus RSLogix 5000
- Ausgangsleistungsbereich ist 10 bis 20 A Spitze mit ±10 bis ±80 VDC Bus
Einführung
Der Soloist verfügt über Hochgeschwindigkeits-Positionslatch-Eingänge und fortschrittliche Datenprotokollierungsfunktionen und ist damit ideal für Labor- und Prüfgeräteanwendungen. Die fortschrittliche Software-Architektur verkürzt die Entwicklungszeit des Kunden und bietet Unterstützung für C#, VB.Net, C und LabVIEW®, kombiniert mit unserer vollständigen IDE und dem Multitasking-Betriebssystem. Der Host-Modus ermöglicht es Ihnen, Befehle über Ethernet oder USB an Ihren PC zu senden und sofort auszuführen.
>
Der Soloist HLe mit linearer Endstufe ist für rauscharme und ultra-leistungsstarke Anwendungen erhältlich. Dieser Controller ist ideal für hohe Bandbreitenanforderungen und zeichnet sich durch eine hervorragende Linearität und null Crossover-Verzerrungen aus. Zum Beispiel profitieren Anwendungen, die viele Bewegungsumkehrungen haben und eine hohe Positionsgenauigkeit erfordern, vom Einsatz der Soloist Linear-Serie.
Motion Composer, die gemeinsame integrierte Entwicklungsumgebung für alle Aerotech-Steuerungen, bietet Anwendern eine Windows®-basierte Software mit leistungsstarken Diagnose-, Debug- und Analysewerkzeugen für OEMs und Endanwender gleichermaßen.
Allen-Bradley-Schnittstelle
Kombinieren Sie eine bewährte SPS mit einer bewährten Bewegungssteuerung für eine einfachere Integration, Inbetriebnahme und Wartung von mittleren und anspruchsvollen Automatisierungsprojekten. Mit der Aerotech EtherNet/IP™-Schnittstelle können AB-SPSen (MicroLogix, CompactLogix™ oder ControlLogix) direkt in den Soloist integriert werden. Bewegungen können direkt in der RSLogix 5000-Umgebung programmiert werden oder es können separate Programme auf der Steuerung geschrieben und von der AB-SPS ausgelöst werden. Aerotech hat zwei Schnittstellen: ASCII und Register. Wählen Sie die SPS, den Motion-Controller und die Schnittstelle, die am besten zu Ihren Anwendungsanforderungen passt.
Gesamtlösung
Die Steuerungen sind vollständig getestet und sofort einsatzbereit. Aerotech kann den Soloist in ein komplettes Bewegungssystem integrieren, so dass Sie sich nicht mehr um die Einrichtung der Parameter und die Abstimmung der Achsen kümmern müssen.
Praktische Leistung
Jede Serie ist in der Lage, eine breite Palette von Motoren anzutreiben, einschließlich bürstenloser Motoren, DC-Servomotoren und Mikroschrittmotoren. Bürstenlose Motoren sind sinusförmig kommutiert, um die Drehmomentwelligkeit zu minimieren.
Durch die Verwendung einer digitalen Servoschleife mit Vorsteuerung verfolgt der Soloist die Geschwindigkeits- und Positionskurven mit nahezu null Fehler. Das integrierte Autotuning und die eingebauten Rechner machen die Servoabstimmung einfach.
>
Variablen, Mathematik und mehr
Mit Variablen und mathematischen Funktionen kann ein einziges Programm verwendet werden, um eine Vielzahl von Teilen zu produzieren, indem der Benutzer einfach nach neuen Anwendungsdaten gefragt wird.
Vielseitigkeit der Anwendung
Der Soloist verfügt über weitere integrierte Funktionen wie Achsenkalibrierung und Spielkompensation, so dass Sie die Genauigkeit und Präzision Ihrer Maschine maximieren können. Die Funktion Benutzereinheiten"" macht es einfach, den Soloist an Ihre spezielle Maschine anzupassen und ermöglicht benutzerdefinierte Einheiten sowohl für lineare als auch für rotierende Anwendungen.
Soloist HLe |
Units |
10-40 |
20-40 |
10-60 |
10-80 |
| Motor Style | Brush, Brushless, Stepper, Voice Coil | Brush, Brushless, Stepper, Voice Coil | Brush, Brushless, Stepper, Voice Coil | Brush, Brushless, Stepper, Voice Coil | |
| Motor Supply | VAC | 115/230; 50/60 Hz; Factory Configured | 115/230; 50/60 Hz; Factory Configured | 115/230; 50/60 Hz; Factory Configured | 115/230; 50/60 Hz; Factory Configured |
| Control Supply(1) | VAC | 85-240 VAC; 50/60 Hz | 85-240 VAC; 50/60 Hz | 85-240 VAC; 50/60 Hz | 85-240 VAC; 50/60 Hz |
| Bus Voltage(2) | VDC | ±40 | ±40 | ±60 | ±80 |
| Peak Output Current (1 sec)(3,4) | Apk | 10 | 20 | 10 | 10 |
| Continuous Output Current(3,4) | Apk | 5 | 10 | 5 | 5 |
| Digital Inputs | 6 Optically Isolated (2 High Speed) | 6 Optically Isolated (2 High Speed) | 6 Optically Isolated (2 High Speed) | 6 Optically Isolated (2 High Speed) | |
| Digital Outputs | 4 Optically Isolated | 4 Optically Isolated | 4 Optically Isolated | 4 Optically Isolated | |
| Analog Inputs | One 16-bit Differential; ±10 V | One 16-bit Differential; ±10 V | One 16-bit Differential; ±10 V | One 16-bit Differential; ±10 V | |
| Analog Outputs | One 16-bit Single-Ended | One 16-bit Single-Ended | One 16-bit Single-Ended | One 16-bit Single-Ended | |
| Dedicated Axis I/O on Feedback Connector | Three Limit Inputs (CW, CCW, Home); Three Hall Effect Inputs (A, B, C); Three High-Speed differential Inputs (sin, cos, mkr for encoder); Motor Over-Temperature Input | Three Limit Inputs (CW, CCW, Home); Three Hall Effect Inputs (A, B, C); Three High-Speed differential Inputs (sin, cos, mkr for encoder); Motor Over-Temperature Input | Three Limit Inputs (CW, CCW, Home); Three Hall Effect Inputs (A, B, C); Three High-Speed differential Inputs (sin, cos, mkr for encoder); Motor Over-Temperature Input | Three Limit Inputs (CW, CCW, Home); Three Hall Effect Inputs (A, B, C); Three High-Speed differential Inputs (sin, cos, mkr for encoder); Motor Over-Temperature Input | |
| Dedicated I/O on Auxiliary Feedback Connector | sin, cos, mkr for Aux Enc; Aux Enc can be used for PSO Output | sin, cos, mkr for Aux Enc; Aux Enc can be used for PSO Output | sin, cos, mkr for Aux Enc; Aux Enc can be used for PSO Output | sin, cos, mkr for Aux Enc; Aux Enc can be used for PSO Output | |
| I/O Expansion Board(5) | 16/16 Digital Opto-Isolated; 3 Analog In (±10 V, 16-bit Differential); 3 Analog Out (±10 V, 16-bit) | 16/16 Digital Opto-Isolated; 3 Analog In (±10 V, 16-bit Differential); 3 Analog Out (±10 V, 16-bit) | 16/16 Digital Opto-Isolated; 3 Analog In (±10 V, 16-bit Differential); 3 Analog Out (±10 V, 16-bit) | 16/16 Digital Opto-Isolated; 3 Analog In (±10 V, 16-bit Differential); 3 Analog Out (±10 V, 16-bit) | |
| High Speed Data Capture | Yes (50 ns Latency) | Yes (50 ns Latency) | Yes (50 ns Latency) | Yes (50 ns Latency) | |
| Automatic Brake Control | Standard; 24 V at 1 A | Standard; 24 V at 1 A | Standard; 24 V at 1 A | Standard; 24 V at 1 A | |
| Emergency Stop Sense Input (ESTOP)(6) | Standard; 24 V Opto-Isolated | Standard; 24 V Opto-Isolated | Standard; 24 V Opto-Isolated | Standard; 24 V Opto-Isolated | |
| Position Synchronized Output (PSO) | Single Axis Standard, Two/Three Axis Optional | Single Axis Standard, Two/Three Axis Optional | Single Axis Standard, Two/Three Axis Optional | Single Axis Standard, Two/Three Axis Optional | |
| Can Output Multiplied Encoder | Yes | Yes | Yes | Yes | |
| Can Output Square Wave Encoder | Yes | Yes | Yes | Yes | |
| Primary Encoder Input Frequency | 32 MHz Square Wave Standard; 500 kHz Sine Wave (MXH) | 32 MHz Square Wave Standard; 500 kHz Sine Wave (MXH) | 32 MHz Square Wave Standard; 500 kHz Sine Wave (MXH) | 32 MHz Square Wave Standard; 500 kHz Sine Wave (MXH) | |
| Secondary Encoder Input Frequency | 32 MHz Square Wave | 32 MHz Square Wave | 32 MHz Square Wave | 32 MHz Square Wave | |
| Encoder Multiplication | Up to x65536 with Quadrature Output (MXH) | Up to x65536 with Quadrature Output (MXH) | Up to x65536 with Quadrature Output (MXH) | Up to x65536 with Quadrature Output (MXH) | |
| Absolute Encoder | Renishaw Resolute BiSS; EnDat 2.1; EnDat 2.2 | Renishaw Resolute BiSS; EnDat 2.1; EnDat 2.2 | Renishaw Resolute BiSS; EnDat 2.1; EnDat 2.2 | Renishaw Resolute BiSS; EnDat 2.1; EnDat 2.2 | |
| Resolver Interface | Optional; 1 or 2 Channel; 16-bit | Optional; 1 or 2 Channel; 16-bit | Optional; 1 or 2 Channel; 16-bit | Optional; 1 or 2 Channel; 16-bit | |
| Internal Shunt Resistor | N/A | N/A | N/A | N/A | |
| External Shunt | N/A | N/A | N/A | N/A | |
| Ethernet | Optional | Optional | Optional | Optional | |
| USB | No | No | No | No | |
| RS-232 | Yes | Yes | Yes | Yes | |
| FireWire | No | No | No | No | |
| Fieldbus | Modbus TCP; Ethernet/IP | Modbus TCP; Ethernet/IP | Modbus TCP; Ethernet/IP | Modbus TCP; Ethernet/IP | |
| Current Loop Update Rate | kHz | 20 | 20 | 20 | 20 |
| Servo Loop Update Rate | kHz | 10 | 10 | 10 | 10 |
| Power Amplifier Bandwidth | kHz | Selectable Through Software | Selectable Through Software | Selectable Through Software | Selectable Through Software |
| Minimum Load Inductance | mH | 0 | 0 | 0 | 0 |
| Operating Temperature | °C | 0 to 50 | 0 to 50 | 0 to 50 | 0 to 50 |
| Storage Temperature | °C | -30 to 85 | -30 to 85 | -30 to 85 | -30 to 85 |
| Weight | kg (lb) | 10.36 (22.8) | 10.36 (22.8) | 10.36 (22.8) | 10.36 (22.8) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
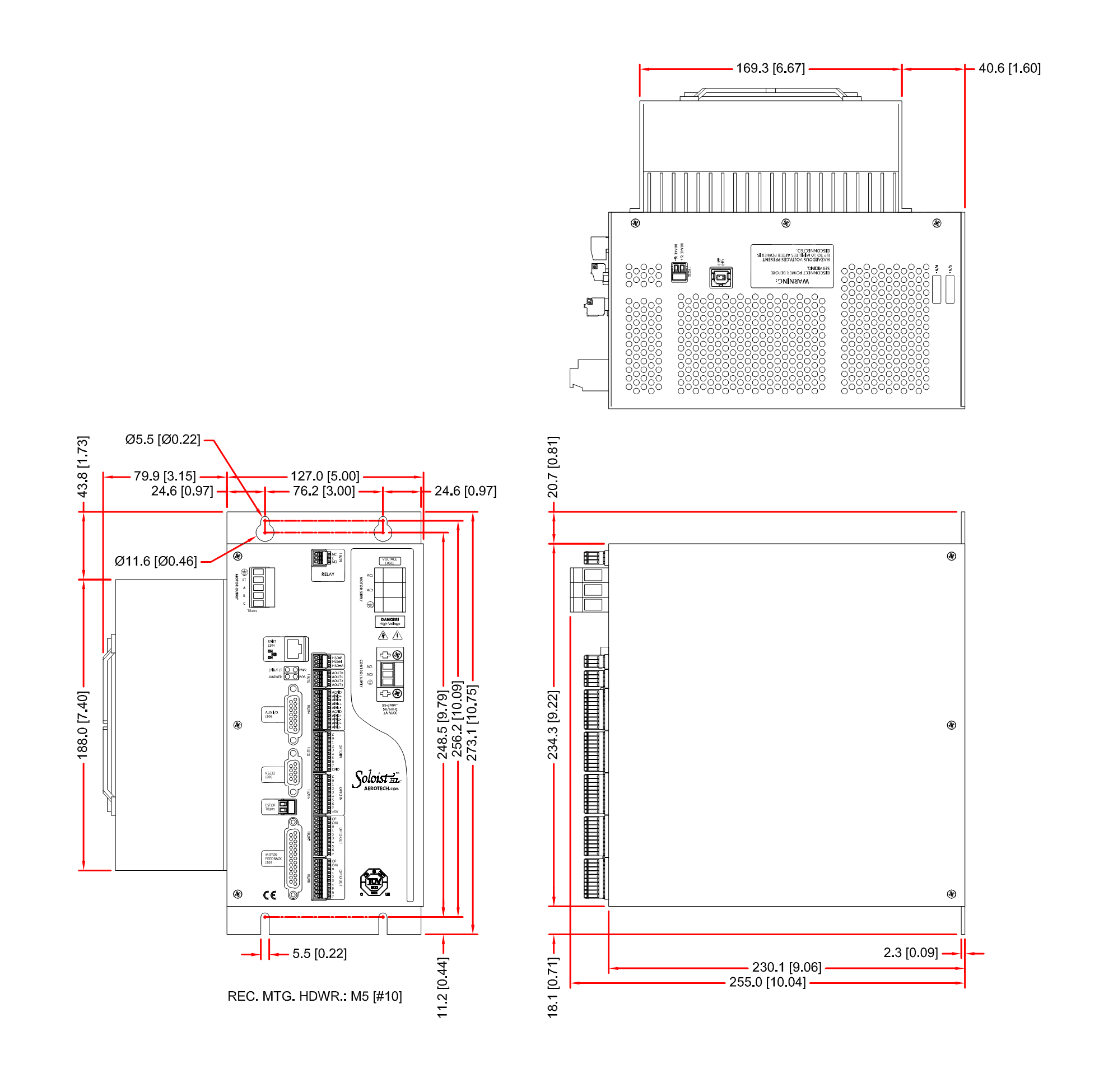
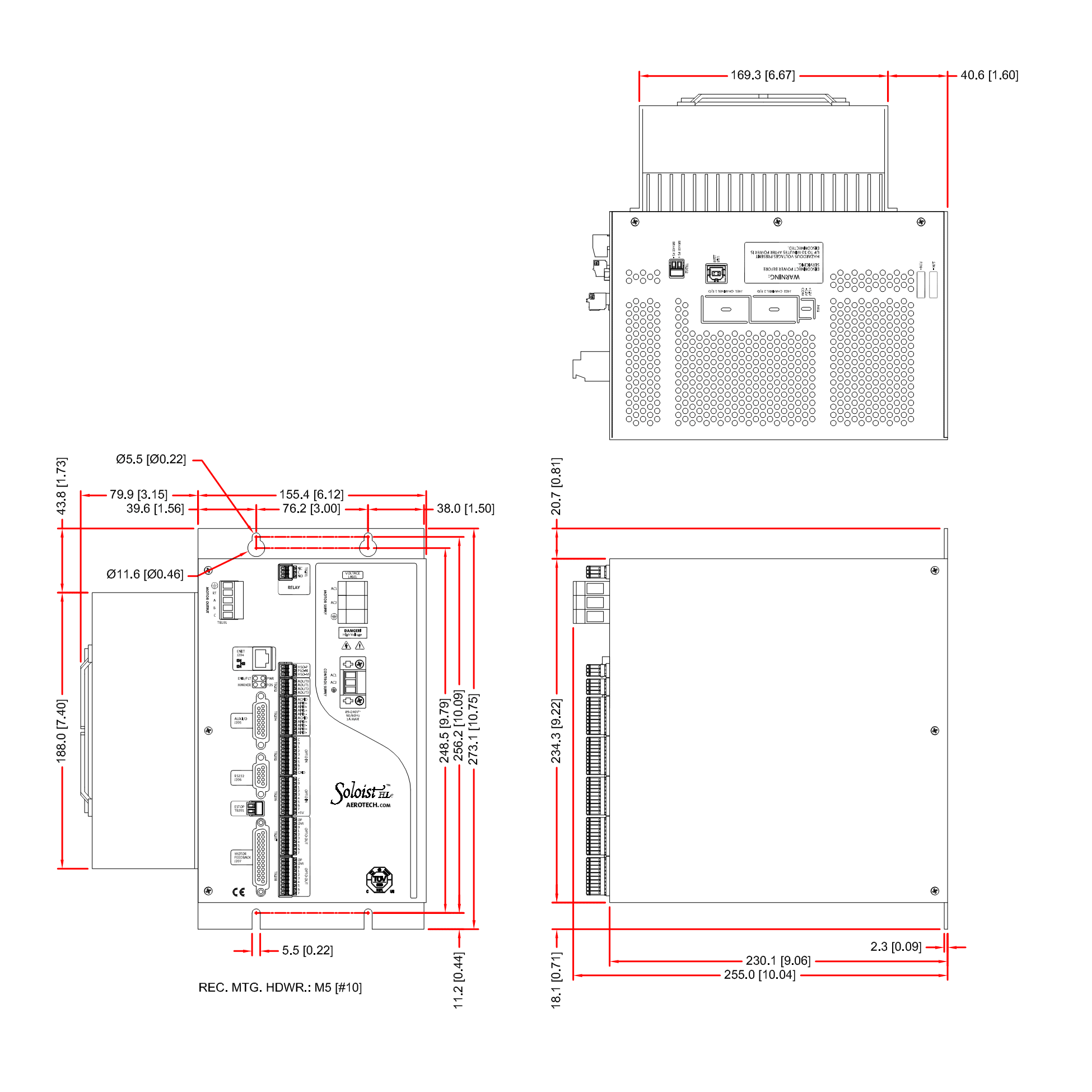
Dimensions
Soloist HLe, Without -IO Option
Soloist HLe, With -IO & Resolver Options
Ordering Information
Soloist HLe
| Option | Description |
| SOLOISTHLE | Soloist HLe series linear digital drive with Ethernet TCP/IP and USB interface, 10-20 A peak, 5-10 A continuous, ±40 to ±80 VDC bus, auxiliary 115/230 VAC input to power logic circuitry; supports voice coil and brushless, brush, and stepper motors. Includes: Four opto-isolated digital inputs (sinking or sourcing) Two high-speed inputs Four opto-isolated digital outputs (sinking only) One 16-bit analog output One 16-bit differential analog input Single-axis PSO capability Two quadrature encoder input channels ESTOP sense input |
Soloist HLe Power Stage Options
| Option | Description |
| 10-40 | 10 A peak; 5 A continuous; ±40 VDC bus |
| 20-40 | 20 A peak; 10 A continuous; ±40 VDC bus |
| 10-60 | 10 A peak; 5 A continuous; ±60 VDC bus |
| 10-80 | 10 A peak; 5 A continuous; ±80 VDC bus |
Soloist HLe Line Voltage (-x) Options
| Option | Description |
| -A | 115 VAC input |
| -B | 230 VAC input |
| -C | 100 VAC input |
| -D | 200/208 VAC input |
Soloist HPe/HLe I/O and Feedback Options
| Option | Description |
| -IO | Expansion board with 16 opto-isolated inputs (sinking or sourcing); 16 outputs (sinking or sourcing); three 16-bit differential analog inputs (±10 V); three 16-bit analog outputs (±10 V); one mechanical brake relay |
| -MXH | Programmable encoder multiplier up to x16384 (x65536 after quadrature); supports single/dual axis PSO and real-time encoder quadrature output |
Soloist HPe/HLe Line PSO Options
| Option | Description |
| -DUALPSO | Two-axis PSO firing; second encoder input through AUX connection on Soloist or through SSINET on I/O board |
| -TRIPLEPSO | Three-axis PSO firing; requires I/O option to provide connections for three-axis of encoder feedback |
| -PSONC | Normally closed PSO output (default normally open) |
Soloist HPe/HLe Line Resolver Options
| Option | Description |
| RDP1-10K | Soloist one-channel resolver to digital feedback card with dynamic resolution switching capability; 10 kHz carrier frequency |
| RDP1-7.5K | Soloist one-channel resolver to digital feedback card with dynamic resolution switching capability; 7.5 kHz carrier frequency |
| RDP1-5K | Soloist one-channel resolver to digital feedback card with dynamic resolution switching capability; 5 kHz carrier frequency |
| RDP2-10K | Soloist two-channel resolver to digital feedback card with dynamic resolution switching capability; 10 kHz carrier frequency |
| RDP2-7.5K | Soloist two-channel resolver to digital feedback card with dynamic resolution switching capability; 7.5 kHz carrier frequency |
| RDP2-5K | Soloist two-channel resolver to digital feedback card with dynamic resolution switching capability; 5 kHz carrier frequency. |
Soloist HPe/HLe Drive Options
| Option | Description |
| -S | 40 W continuous; 400 W peak internal shunt resistor network for HPe10/20 (only valid on HPe10/20) |
| -EXTSHUNT | Two-pin connector for external shunt on HPe50/75/100; external shunt not provided |
| -EIP | Enable EtherNet/IP™ on the drive; SOLOIST-MC software must be configured with the ETHERNET/IP option |
| -DCT | Enable the Dynamic Controls Toolbox on the drive; SOLOIST-MC software must be configured with the DYNAMIC CONTROLS TOOLBOX option |
| -ETM | Enable the Enhanced Throughput Module on the drive; SOLOIST-MC software must be configured with the ENHANCED THROUGHPUT MODULE option |
| -ETC | Enhanced Tracking Control for reduced dynamic following error and settling times; effectiveness may be limited for low-resolution axes |
| -LCK | Locked drive; firmware and calibration data on the drive cannot be modified by the user after the product leaves Aerotech; the drive must be returned to Aerotech if firmware/calibration updates are required; read/write access to parameters and programs is supported |