Ensemble Epaq Stand-Alone Controller und Drive Rack
Nicht empfohlen für neue Designs. Siehe die neue Automation1-iXR3. Der Ensemble® Epaq ist Aerotechs Stand-Alone-Controller für Anwendungen mit mittlerer bis hoher Leistung. Er bietet eine Funktionalität, die für Anwendungen von grundlegenden Laborexperimenten und allgemeiner Positionierung bis hin zu fortschrittlichen OEM-Systemen geeignet ist, und das zu einem erschwinglichen Preis. Der Ensemble Epaq wird in einer 6-Achsen-Tischversion (Rackmontage optional) mit Display und Jogpad angeboten.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Gestaltungsmerkmale
- Bis zu sechs integrierte Antriebe in einer Stand-alone-Steuerung
- Zusätzliche externe Antriebsachsen können hinzugefügt werden, um bis zu neun Achsen mit koordinierter Bewegung zu ermöglichen
- Controller-Architektur, die die Bewegung von bis zu fünf unabhängigen Aufgaben koordinieren kann
- Fähig zum Antrieb und zur Steuerung von linearen oder rotierenden bürstenlosen, DC-Bürsten-Servomotoren und Mikro-Schrittmotoren
- Komplette Bewegungsfunktionen: Punkt-zu-Punkt, lineare und zirkuläre Interpolation, elektronisches Getriebe, Geschwindigkeitsprofilierung
- Programmieren in AeroBasic mit der IDE, Microsoft .NET einschließlich C#, VB.NET, C++/CLI, LabVIEW und MATLAB
- Ferngesteuerte ASCII-Schnittstelle für Windows- oder Nicht-Windows-Programme (einschließlich Linux) zur Steuerung des Epaq über Standard-Ethernet oder RS-232-Port
- Erweiterte Windows-basierte Ferndiagnose-, Tuning- und Programmierschnittstellen-Software
- Frontpanel-Display und Steuerkreuz für komfortable menügeführte Achsensteuerung und Statusüberprüfung
- Achs-Jogging/Steuerung mit optionalem Joystick
- CE-geprüft, NRTL-Sicherheitszertifizierung, EU 2015/863 RoHS 3-Richtlinie
- Vollständig kompatibel mit den EPICS-Softwaretools und -Anwendungen, wodurch Ensemble ideal für den Einsatz in Synchrotron- und allgemeinen Laboreinrichtungen geeignet ist
- Allen-Bradley EtherNet/IP-Schnittstelle bietet volle Integration mit Ensemble; programmieren Sie das Ensemble direkt von RSLogix 5000 aus
Vielseitige, eigenständige Mehrachsensteuerung
Das Ensemble Epaq wird als 6-achsige Tischversion (Rack-Montage optional) mit Display und Jog-Pad angeboten. Sie enthält integrierte Stromversorgungen und steckbare Motor- und IO-Anschlüsse. Es werden PWM-Verstärker zur Steuerung von bürstenbehafteten, bürstenlosen und Schrittmotoren angeboten. Für Anwendungen mit hoher Leistung und geringem Rauschen sind auch Linearverstärker erhältlich. Externe Verstärker mit höherer Leistung können über die serielle Hochgeschwindigkeitsschnittstelle AeroNet an den Epaq angeschlossen werden, so dass insgesamt neun Achsen koordiniert bewegt werden können.
Dieser flexible Konfigurationsstil erlaubt es dem Anwender, verschiedene Antriebstypen (linear versus PWM, bürstenlos oder bürstenbehaftet, Schrittmotor, etc.) innerhalb desselben Positioniersystems unter Verwendung einer gemeinsamen Programmier- und Steuerungsplattform nahtlos zu kombinieren.
Mehrere Epaqs können von einem Windows®-PC über Ethernet oder USB gesteuert werden. Die optionale On-Board-Encoder-Interpolation bietet dem Anwender eine programmierbare Achsenauflösung (unter Annahme eines Sinus-Encoder-Eingangssignals), einschließlich der Möglichkeit, die Interpolationswerte (Multiplikation) per Software zu ändern.
Mächtige und intuitive Programmierfunktionalität
Mehrfache AchsensteuerungIm Gegensatz zu den meisten Controllern auf dem Markt ist es nicht notwendig, einen kryptischen Befehlssatz zu verstehen, um Bewegungen zu erzeugen. Die intuitive Benutzeroberfläche ermöglicht es dem Anwender, sofort mit der Programmierung zu beginnen. Die Online-Hilfe von Ensemble vereinfacht das Schreiben von Bewegungsprogrammen zusätzlich und enthält viele funktionale Beispiele, die leicht für Kundenanwendungen modifiziert werden können.
Die Software Ensemble mit integrierter Entwicklungsumgebung bietet eine grafische Benutzeroberfläche unter Windows®, die einen intuitiven Programmeditor, ein Fenster für die Variablenausgabe, ein Fenster für die Compilerausgabe und einen Task-Status-Monitor umfasst. Mit dieser Oberfläche kann der Anwender alle Aspekte seines Positioniersystems, egal wie komplex, einfach überwachen. Die Achsensteuerungs- und Diagnosebildschirme werden außerdem durch ein voll funktionsfähiges Autotuning-Dienstprogramm ergänzt, das die Startzeit minimiert und eine einfache Optimierung der Bewegungsachsen ermöglicht. Systemdiagnosen lassen sich einfach über die Schnittstelle ablesen. Das Windows-basierte Remote-Softwarepaket ist im Lieferumfang jedes Geräts enthalten und ermöglicht dem Benutzer das Hoch- und Herunterladen von Programmen, das Ändern von Parameterdateien und das Analysieren von Bewegungen mit dem fortschrittlichen grafischen Tuning-Paket von Aerotech, alles bequem von einem Remote-PC aus.
Ob im Stand-alone-Modus über die Frontplatte oder per Fernsteuerung über Ethernet oder USB, die volle Funktionalität des Ensemble Epaq ist verfügbar. Integrierte Konfigurations- und Überwachungsprogramme vereinfachen die Fernkommunikation. Um eine einfache serielle Verbindung und eine einfache Bedienung zu ermöglichen, verfügt der Epaq über einen RS-232-Anschluss (ein zusätzlicher RS-232-Anschluss ist eine Option).
Erweiterte DSP-Steuerung
Der Ensemble Epaq nutzt die Rechenleistung mehrerer Fließkomma-DSPs mit doppelter Genauigkeit, um eine außergewöhnliche Leistung in einer Vielzahl von Anwendungen zu bieten, darunter Punkt-zu-Punkt-Bewegungen, lineare und zirkuläre Interpolation, ein- und mehrachsige Fehlerkorrektur, direkte Kommutierung von linearen und rotierenden bürstenlosen Servomotoren und On-Board-Servo-Autotuning. Hochgeschwindigkeits-Interrupts und Datenlogging-Funktionen bieten eine Echtzeit-Verbindung zu externen Systemen. Der Ensemble Epaq bietet außerdem eine Hochgeschwindigkeits-Positionsverriegelung und eine optionale einachsige PSO-Funktion (Position Synchronized Output). Egal, ob die Anforderung eine einfache Punkt-zu-Punkt-Bewegung oder eine komplexe Geschwindigkeitsprofil-Kontur mit fliegendem Ausgang ist, Ensemble gewährleistet Spitzenleistung für kritische Anwendungen.
Integrale Antriebe
Bürstenlose Servo-, DC-Bürstenservo- und Mikroschrittantriebe sind in den kompakten Rahmen des Ensemble Epaq integriert. Der Epaq kann eine beliebige Kombination von bis zu sechs integrierten Antrieben steuern, während die Ensemble-Architektur eine weitere Erweiterung (mit externen Stand-alone-Einzelachsen-Antriebseinheiten) auf insgesamt bis zu neun Achsen zulässt. Da der Epaq viele verschiedene Motortypen steuern kann, haben Kunden eine ausgezeichnete Flexibilität bei ihren Systemdesigns. Luftgelagerte Linearmotoren mit hoher Genauigkeit können vom selben Controller gesteuert werden, der auch Antriebe mit geringerer Präzision mit Servo- oder Schrittmotoren betreibt. Die Parameter lassen sich für diese verschiedenen Motoren und Rückführgeräte leicht umkonfigurieren, so dass sich die Kunden an wechselnde Systemanforderungen anpassen können.
Erweiterte Eingangs-/Ausgangsmöglichkeiten
Jeder Epaq verfügt über einen optionalen zweiten RS-232-Anschluss und einen Achsenerweiterungsanschluss. Pro Achse bietet der Epaq außerdem ein optionales E/A-Paket mit acht digitalen Ein- und Ausgängen, einem 12-Bit-Analogeingang (±10 VDC), einem 16-Bit-Ausgang (±5 VDC), einem konfigurierbaren Bremsenausgang, einem zweiten TTL-Encoder-Eingang für die Zweikreissteuerung und entweder einem zweiten Marker-Eingang oder PSO-Ausgang. Dieses optionale E/A-Paket kann zu jeder Achse hinzugefügt werden, so dass zahlreiche E/A an den Epaq angeschlossen werden können.
Erweiterung eines erfolgreichen Erbes
Obwohl Ensemble als universell einsetzbare, eigenständige Steuerung konzipiert ist, führt sie die Erfolgsgeschichte der äußerst erfolgreichen A3200- und Soloist™-Steuerungen von Aerotech fort. Sie bietet erweiterte Funktionen, die sie zu einer idealen Wahl für viele aggressive Motion-Control-Anwendungen machen. Die Ensemble-Bewegungssteuerungsarchitektur baut auf der intuitiven grafischen Benutzeroberfläche des Soloist auf und bietet gleichzeitig erweiterte Funktionen, die für die Steuerung mehrerer Achsen geeignet sind. Vorcodierte LabVIEW®-VIs, AeroBasic™-Programmierfunktionalität, MATLAB®-Bibliothek, .NET-Tools für C#, VB.NET und C++/CLI oder C machen die Bedienung des Ensemble noch einfacher. Auf der Ensemble Control-Homepage finden Sie detaillierte Informationen zu den Software-Funktionen und Bestellmöglichkeiten.
Allen-Bradley-Schnittstelle
Kombinieren Sie eine bewährte SPS mit einer bewährten Bewegungssteuerung für eine einfachere Integration, Inbetriebnahme und Wartung von mittleren und anspruchsvollen Automatisierungsprojekten. Mit der Aerotech EtherNet/IP™-Schnittstelle können AB-SPSen (MicroLogix, CompactLogix™ oder ControlLogix) direkt in das Ensemble integriert werden. Bewegungen können direkt in der RSLogix 5000-Umgebung programmiert werden oder es können separate Programme auf der Steuerung geschrieben und von der AB-SPS ausgelöst werden. Aerotech verfügt über zwei Schnittstellen: ASCII und Register. Wählen Sie die SPS, den Motion-Controller und die Schnittstelle, die am besten zu Ihren Anwendungsanforderungen passt.
EPICS-Treiber
Jede Ensemble-Installation beinhaltet volle Kompatibilität mit dem verteilten Open-Source-Steuerungssystem EPICS. EPICS wird weltweit an führenden Lichtquellen (Synchrotron) und in anderen staatlichen Labors eingesetzt, so dass sich Ensemble nahtlos in Anwendungen aller großen Forschungseinrichtungen integrieren lässt.
Feature |
Units |
Description |
| Number of Axes | 1 to 6 | |
| Encoder Inputs | 1 to 6 | |
| Motor Style | Brush, brushless, Stepper | |
| Power Supply | VAC | 100/115/200/230 VAC; 50/60 Hz (Factory Configured) |
| Bus Voltage | VDC | 40, 40LP, 80, 80LP, 10B, 20B, 30B, 40B |
| Peak Output Current (1 sec)_1 | Apk | 10 |
| Continuous Output Current_1 | Apk | 5 |
| Digital Inputs | No | |
| Digital Outputs | No | |
| Analog Inputs | One 16-bit Analog Input per Axis | |
| Analog Outputs | No | |
| Dedicated Axis I/O on Feedback Connector | Three Limit Inputs (CW, CCW, Home); Three Hall Effect Inputs (A, B, C); Three High-Speed Differential Inputs (sin, cos, mkr for encoder); Motor Over-Temperature Input; One 16-bit Analog Input | |
| Dedicated I/O on Auxiliary Feedback Connector | sin, cos, mkr for Aux Enc; Aux Enc can be used for PSO Output | |
| I/O Expansion Board_2 | One 12-bit Differential Analog Input; One 16-bit Analog Output; Eight Digital Inputs, Optically Isolated, Sinking or Sourcing; Eight Optically Isolated Digital Outputs per Axis | |
| High Speed Data Capture | Yes_2 | |
| High Speed Digital Outputs | No | |
| BiDirectional Lines | No | |
| Automatic Brake Control | Optional | |
| Emergency Stop (ESTOP) | Optional | |
| Position Synchronized Output (PSO) | Single Axis Standard | |
| Can Output Multiplied Encoder | Yes (only with MXH option) | |
| Can Output Square Wave Encoder | Yes | |
| Primary Encoder Input Frequency with Multiplication | 200 kHz (MXU) or 450 kHz (MXH) sine wave | |
| Primary Encoder Input Frequency Square Wave | 10 MHz square wave frequency/40 MHz count rate | |
| Secondary Encoder Input Frequency | 10 MHz square wave frequency/40 MHz count rate | |
| Laser Feedback Support | No | |
| Encoder Multiplication_3 | x4096 (MXU); x65536 (MXH) | |
| Resolver Interface | No | |
| Internal Shunt Resistor | No | |
| External Shunt | No | |
| Ethernet | Yes | |
| USB | Yes | |
| RS-232 | Yes | |
| FireWire | No | |
| Fieldbus | Modbus TCP on PC | |
| Joystick | Yes | |
| Additional Interfaces | 10/100 Base T Ethernet communication interface for system setup, application networking, Epaq-to-Epaq communications, embedded programming, immediate commands, and Modbus over TCP; USB communication interface for system setup, application networking, Windows® PC control interface; RS-232 port with programmable baud rate, length, parity, stop bits (second RS-232 port optional) ESTOP to Stop All Axes) Display: Backlit 8 x 40 Character LCD) Keypad: 5-Key Input Pad |
|
| Current Loop Update Rate | kHz | 20 |
| Servo Loop Update Rate | kHz | 1 to 20 |
| Power Amplifier Bandwidth | kHz | Selectable Through Software |
| Minimum Load Inductance | mH | 0.1 mH with PWM; 0 with Linear |
| Operating Temperature | °C | 0 to 50 |
| Storage Temperature | °C | -30 to 85 |
| Weight | kg (lb) | 10 (22) |
| Package | Desktop or Rackmount | |
| Compliance | CE approved, EU 2015/863 RoHS 3 directive |
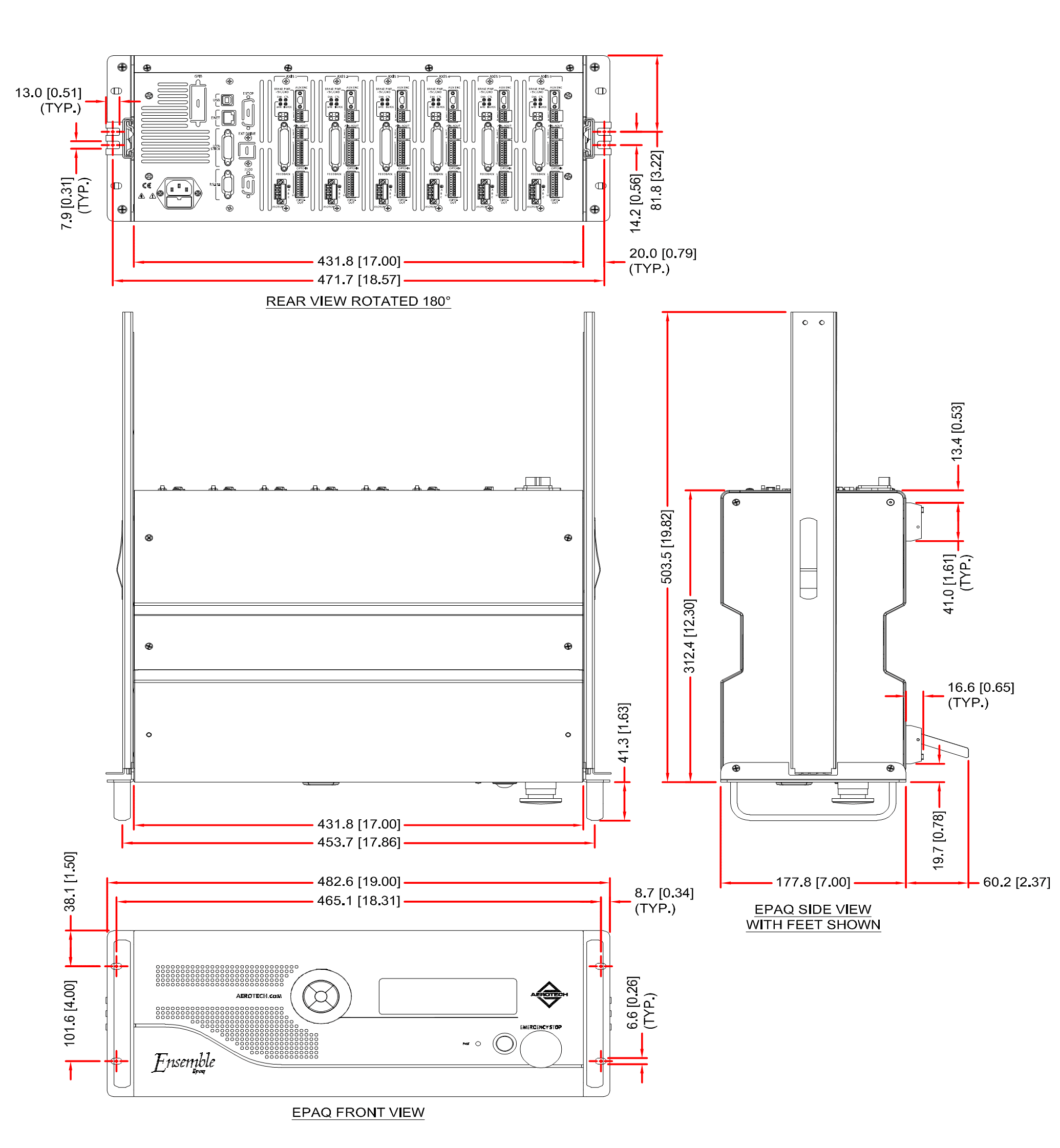
Dimensions
Ensemble Epaq
Ordering Information
Ordering Options
| Line Cord | Brake Options | Options |
| /ENGLAND /GERMANY /ISRAEL /AUSTRALIA /INDIA /US-115VAC /US-230VAC /NOLINECORD |
/Brake-1 /Brake-2 /Brake-3 /Brake-4 /Brake-5 /Brake-6 |
/ESTOP0 /ESTOP1 /EXTAMP /SLIDE /RS232-2 |
Epaq
| Option | Description |
| Epaq-S | Six axis, desktop, stand-alone motion controller with integrated power supplies, and servo/stepping motor amplifiers. Features include independent or coordinated motion, point to point, linear and circular interpolation, constant velocity, velocity profiled, time based, free-run motion types, electronic gearing, backlash compensation, and 1D or 2D axis calibration. Ensemble Standard HMI Multi-Axis Software included. Up to 10 kHz servo update rate for all axes Digital servo loop One 10/100 base T Ethernet port, one USB 2.0 port, one RS-232 port Dedicated I/O per axis includes: CW, CCW, and home limits, marker, Hall effect sensors, enable, fault, for each axis User defined I/O includes eight opto-isolated inputs (sinking or sourcing), eight outputs (sinking or sourcing), one 12-bit analog input, one 16-bit analog output and brake relay; this I/O is on Axis 1; optional adder for axes 2-6 |
| Epaq-R | Six axis, rack-mount, stand-alone motion controller with integrated power supplies, and servo/stepping motor amplifiers. Features include independent or coordinated motion, point to point, linear and circular interpolation, constant velocity, velocity profiled, time based, free-run motion types, electronic gearing, backlash compensation, and 1D or 2D axis calibration. Ensemble Standard HMI Multi-Axis Software included. Up to 10 kHz servo update rate for all axes Digital servo loop One 10/100 base T Ethernet port, one USB 2.0 Port, one RS-232 port Dedicated I/O per axis includes: CW, CCW, and home limits, marker, Hall effect sensors, enable, fault, for each axis User defined I/O includes eight opto-isolated inputs (sinking or sourcing), eight outputs (sinking or sourcing), one 12-bit analog input, one 16-bit analog output and brake relay; this I/O is on Axis 1; optional adder for axes 2-6 |
Standard or Blank Front Panel (must select one)
| Option | Description |
| -FPB | Blank front panel (without display or keypad) |
| -FPD | Standard front panel (with display and keypad) |
| -FPBE | Blank front panel with ESTOP switch (without display or keypad) |
| -FPDE | Standard front panel with ESTOP switch (with display and keypad) |
Line Voltage (must select one)
| Option | Description |
| /A | 115 VAC line voltage |
| /B | 230 VAC line voltage |
| /C | 100 VAC line voltage |
| /D | 200 VAC line voltage |
Bus Power Supply
| Option | Description |
| 40 | 40 VDC motor supply, 600 W |
| 40LP | 40 VDC motor supply, 300 W |
| 80 | 80 VDC motor supply, 600 W |
| 80LP | 80 VDC motor supply, 300 W |
| 10B | ±10 VDC bipolar motor supply, 400 W |
| 20B | ±20 VDC bipolar motor supply, 400 W |
| 30B | ±30 VDC bipolar motor supply, 400 W |
| 40B | ±40 VDC bipolar motor supply, 600 W |
Axis 1 Amplifier Options (must select one)
| Option | Description |
| /1-MP10I | Digital PWM amplifier, 10 A peak, 5 A continuous with I/O option |
| /1-MP10MI | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /1-ML10I | Digital linear amplifier, 10 A peak, 5 A continuous with I/O option |
| /1-ML10MI | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /1-ML10HI | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) with I/O option |
- Effective multiplication factor specified after quadrature decoding (if applicable).
Axis 2 Amplifier Options (must select one)
| Option | Description |
| /2-MP10 | Digital PWM amplifier, 10 A peak, 5 A continuous |
| /2-MP10I | Digital PWM amplifier, 10 A peak, 5 A continuous with I/O option |
| /2-MP10M | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /2-MP10MI | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /2-BLANK | No amplifier |
| /2-BLANKW | No amplifier, pre-wired only |
| /2-ML10 | Digital linear amplifier, 10 A peak, 5 A continuous |
| /2-ML10I | Digital linear amplifier, 10 A peak, 5 A continuous with I/O option |
| /2-ML10M | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /2-ML10MI | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /2-ML10H | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) |
| /2-ML10HI | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) with I/O option |
- Effective multiplication factor specified after quadrature decoding (if applicable).
Axis 3 Amplifier Options (must select one)
| Option | Description |
| /3-MP10 | Digital PWM amplifier, 10 A peak, 5 A continuous |
| /3-MP10I | Digital PWM amplifier, 10 A peak, 5 A continuous with I/O option |
| /3-MP10M | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /3-MP10MI | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /3-BLANK | No amplifier |
| /3-BLANKW | No amplifier, pre-wired only |
| /3-ML10 | Digital linear amplifier, 10 A peak, 5 A continuous |
| /3-ML10I | Digital linear amplifier, 10 A peak, 5 A continuous with I/O option |
| /3-ML10M | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /3-ML10MI | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /3-ML10H | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) |
| /3-ML10HI | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) with I/O option |
- Effective multiplication factor specified after quadrature decoding (if applicable).
Axis 4 Amplifier Options (must select one)
| Option | Description |
| /4-MP10 | Digital PWM amplifier, 10 A peak, 5 A continuous |
| /4-MP10I | Digital PWM amplifier, 10 A peak, 5 A continuous with I/O option |
| /4-MP10M | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /4-MP10MI | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /4-BLANK | No amplifier |
| /4-BLANKW | No amplifier, pre-wired only |
| /4-ML10 | Digital linear amplifier, 10 A peak, 5 A continuous |
| /4-ML10I | Digital linear amplifier, 10 A peak, 5 A continuous with I/O option |
| /4-ML10M | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /4-ML10MI | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /4-ML10H | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) |
| /4-ML10HI | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) with I/O option |
- Effective multiplication factor specified after quadrature decoding (if applicable).
Axis 5 Amplifier Options (must select one)
| Option | Description |
| /5-MP10 | Digital PWM amplifier, 10 A peak, 5 A continuous |
| /5-MP10I | Digital PWM amplifier, 10 A peak, 5 A continuous with I/O option |
| /5-MP10M | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /5-MP10MI | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /5-BLANK | No amplifier |
| /5-BLANKW | No amplifier, pre-wired only |
| /5-ML10 | Digital linear amplifier, 10 A peak, 5 A continuous |
| /5-ML10I | Digital linear amplifier, 10 A peak, 5 A continuous with I/O option |
| /5-ML10M | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /5-ML10MI | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /5-ML10H | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) |
| /5-ML10HI | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) with I/O option |
- Effective multiplication factor specified after quadrature decoding (if applicable).
Axis 6 Amplifier Options (must select one)
| Option | Description |
| /6-MP10 | Digital PWM amplifier, 10 A peak, 5 A continuous |
| /6-MP10I | Digital PWM amplifier, 10 A peak, 5 A continuous with I/O option |
| /6-MP10M | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /6-MP10MI | Digital PWM amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /6-BLANK | No amplifier |
| /6‑BLANKW | No amplifier, pre-wired only |
| /6-ML10 | Digital linear amplifier, 10 A peak, 5 A continuous |
| /6-ML10I | Digital linear amplifier, 10 A peak, 5 A continuous with I/O option |
| /6-ML10M | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) |
| /6-ML10MI | Digital linear amplifier, 10 A peak, 5 A continuous; x4096 MXU(1) with I/O option |
| /6-ML10H | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) |
| /6-ML10HI | Digital linear amplifier, 10 A peak, 5 A continuous; x65536 MXH(1) with I/O option |
- Effective multiplication factor specified after quadrature decoding (if applicable).
Line Cord (must select one)
| Option | Description |
| /ENGLAND | UK compatible line cord |
| /GERMANY | German compatible line cord |
| /ISRAEL | Israel compatible line cord |
| /INDIA | India compatible line cord |
| /AUSTRALIA | Australia compatible line cord |
| /US-115VAC | Us 115 VAC line cord |
| /US-230VAC | US 230 VAC line cord |
| /NO-LINECORD | No line cord |
Brake Options (up to 2 selections allowable)
| Option | Description |
| /BRAKE-1 | Axis 1 wired for 24 V, 1 A brake |
| /BRAKE-2 | Axis 2 wired for 24 V, 1 A brake (amp must have “I” or “MI” option) |
| /BRAKE-3 | Axis 3 wired for 24 V, 1 A brake (amp must have “I” or “MI” option) |
| /BRAKE-4 | Axis 4 wired for 24 V, 1 A brake (amp must have “I” or “MI” option) |
| /BRAKE-5 | Axis 5 wired for 24 V, 1 A brake (amp must have “I” or “MI” option) |
| /BRAKE-6 | Axis 6 wired for 24 V, 1 A brake (amp must have “I” or “MI” option) |
Options (multiple selections allowable)
| Option | Description |
| /ESTOP0 | Provides user with a mushroom switch on front panel to stop motion, disable, and disconnect AC to motor power supply; requires -FPDE or -FPBE options |
| /ESTOP1 | Controller stops motion, then disables servo control; internal positive guided relay with monitor contact disconnects AC power source from motor; operator risk assessment is the responsibility of the end user or integrator; not compatible with -FPBE or FPDE; user must provide external ESTOP switch and wiring to the Epaq |
| /EXTAMP | External amplifier interface connector |
| /SLIDE | Rack-mount slides to be used with Epaq-R |
| /RS232-2 | Second RS-232 interface port |
Standard Motor Power and Combination Power/Feedback Cables (order as separate line items)
| Option | Description |
| C21481-50 | CABLE: BL MTR-4TS-4MS-LP1-MAX450DM: MS motor power cable; Epaq 4-terminal connector to 4-pin MS connector; 5 A continuous current; 5 meters long |
| C21491-50 | CABLE: BL MTR-4TS-4DU-LP1-MAX450DM: HPD motor power cable; Epaq 4-terminal connector to 4-pin high power D connector; 5 A continuous current; 5 meters long |
| C21511-50 | CABLE: BL MTR-4TS-4DU-LP1-HF-MAX450DM: Hi Flex HPD motor power cable; Epaq 4 terminal connector to 4-pin High Power D connector; 5 A continuous current; 5 meters long |
| C21501-50 | CABLE: BL MTR & FB-4TS-25DU-25DU-MAX107DM: 25-pin D stage to split Epaq 4-terminal strip motor power and 25D feedback cable; 5 meters long |
| C21521-50 | CABLE: SM MTR & FB-25DU-4TS-23B-MAX107DM: 23-pin stepper motor connector to split Epaq 4-terminal strip motor power and 25D feedback cable; 5 meters long |
| C22091-50 | Motor power cable, high flex, 5.0 meters long, for use with Epaq; 4 A continuous current rating, to be used with 10 A peak drives ONLY
|
Accessories
| Option | Description |
| /JBV | Joystick with 5 ft cable |
| /JI | Industrial joystick with 5 ft cable |
Integration (Required)
Aerotech offers both standard and custom integration services to help you get your system fully operational as quickly as possible. The following standard integration options are available for this system. Please consult Aerotech if you are unsure what level of integration is required, or if you desire custom integration support with your system.
| Option | Description |
| -TAS | Integration - Test as system Testing, integration, and documentation of a group of components as a complete system that will be used together (ex: drive, controller, and stage). This includes parameter file generation, system tuning, and documentation of the system configuration. |
| -TAC | Integration - Test as components Testing and integration of individual items as discrete components that ship together. This is typically used for spare parts, replacement parts, or items that will not be used together. These components may or may not be part of a larger system. |