Automation1 GL4 Laser-Scan-Kopf-Antrieb
Der GL4 bietet eine optimierte Plattform für die Steuerung der FTS-Scanner-Familie von Aerotech. Branchenführende Einschwingzeiten, thermische Langzeitstabilität und Tracking-Genauigkeit im Mikrometerbereich werden durch fortschrittliche Funktionen wie Full-State-Feedforward, 200-kHz-Servoraten und Look-Ahead-basierte Geschwindigkeitsregelung ermöglicht.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Gestaltungsmerkmale
- Bestandteil der Automation1-Präzisions-Bewegungssteuerungsplattform von Aerotech
- Kompatibel mit A3200 Version 6.04 und neuer
- Zweiachsiger Servoantrieb mit geschlossenem Regelkreis für die Scanner der AGV-Serie von Aerotech
- Infinite Field of View (IFOV) kombiniert nahtlos AGV- und Servo-Bewegung, um den Arbeitsbereich des Scanners zu erweitern
- Vollständige Servo-Zustandssteuerung mit "Null-Schleppfehler" eliminiert geschwindigkeitsbedingte Teileverzerrungen wie Einschnürungen auf Kreisen und Abrundungen von Ecken
- HyperWire®-Lichtwellenleiter-Schnittstelle
- Externer Takteingang zur Synchronisation mit modengekoppelten Lasern
- Positionsbasiertes Laserfeuern (PSO) mit Fensterung sorgt für konstante Punktabstände über einen weiten Bereich von Betriebsgeschwindigkeiten
- Positionssynchronisierter Ausgang (PSO) für Teilgeschwindigkeiten enthalten
Sehen Sie, wie die Enhanced Tracking Control (ETC)-Funktion die Laserspot-Platzierung durch Galvo-Scan-Köpfe verbessert.
Hochauflösendes Feedback
Der AGV-HP verfügt über thermisch stabile Rückkopplungswandler mit praktisch keiner Verstärkungs- oder Offsetdrift. Der GL4 nutzt eine fortschrittliche Interpolationselektronik, um eine effektive Auflösung von bis zu 26 Bit zu erreichen. Die integrierte Echtzeit-2D-Kalibrierung gewährleistet eine genaue Strahlplatzierung über das gesamte Sichtfeld.
Positionssynchronisierter Ausgang (PSO)
Die Fähigkeit, einen Laserspot in Abhängigkeit von der Position der X/Y-Achse genau zu platzieren, ist ein Hauptmerkmal der linearen Positioniertische von Aerotech für Laserbearbeitungsanwendungen (siehe Abbildungen 1 und 2). Mit der Einführung des GL4 ist diese Funktionalität nun auch für Scanneranwendungen verfügbar. Durch die Möglichkeit, den Laser in Abhängigkeit von der Position genau zu triggern, entfällt die Notwendigkeit, Markierungs-, Sprung- und Polygonverzögerungen zu programmieren, was zu einer geringeren Programmierkomplexität führt. Durch die Verwendung der positionssynchronisierten Ausgabefunktionalität können scannerbasierte Prozesse nun auf die gleiche Weise programmiert werden wie herkömmliche X/Y-Bühnenanwendungen.
Remote Power Devices
Bei den meisten konkurrierenden Scannern sind die Stromversorgungsgeräte direkt in den Kopf integriert, zusammen mit den Galvos und den Feedback-Geräten. Diese Stromversorgungsgeräte können beträchtliche thermische Energie in den Scannerkopf einspeisen, was zu einer Drift in den Rückkopplungspositionen und zu wechselnden Offsets zwischen den Spiegeln führt, was die Markiergenauigkeit verringert. Einige Systeme verwenden PWM-Leistungsstufen, um den Wärmeeintrag zu minimieren. Dieser Ansatz führt jedoch zu einer verringerten Nachführgenauigkeit aufgrund von nichtlinearen Effekten, die auftreten, wenn die Galvo-Motoren und Steuerströme umgepolt werden. Durch die Verlagerung der Leistungsstufe aus dem Kopf heraus ist es möglich, leistungsstärkere Transistoren zur Ansteuerung der Galvos zu verwenden und die Wärmequelle wird effektiv vom Scanner entfernt, was zu einer verbesserten Systemgenauigkeit führt (siehe Abbildungen 3 und 4).
Feature |
Description |
| Motor Supply | ±40 VDC max |
| Control Supply | 85-240 VAC; 50-60 Hz |
| Digital Inputs | Four Optically Isolated |
| Digital Outputs | Four Optically Isolated |
| Analog Inputs | One 16-Bit Differential; ±10 V |
| Analog Outputs | Two 16-Bit Single-Ended; ±10 V |
| Laser Outputs | Three Optically Isolated; 3 TTL |
| Emergency Stop Sense Input (ESTOP) | Standard; 24 V Opto-Isolated |
| Position Synchronized Output (PSO)(1) | Standard: - Three-axis PSO - Three-axis Part-Speed PSO |
| Enhanced Scanner Control (ESC)(2) | Optional: ESC-specific drive hardware & firmware configuration enables ESC feature. |
| Interpolated Feedback Output | Yes |
| Communication Bus | HyperWire® fiber-optic interface |
| Operating Temperature | 0 to 50°C |
| Storage Temperature | -30 to 85°C |
| Weight | 2.9 kg |
| Servo Loop Rate | 200 kHz |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
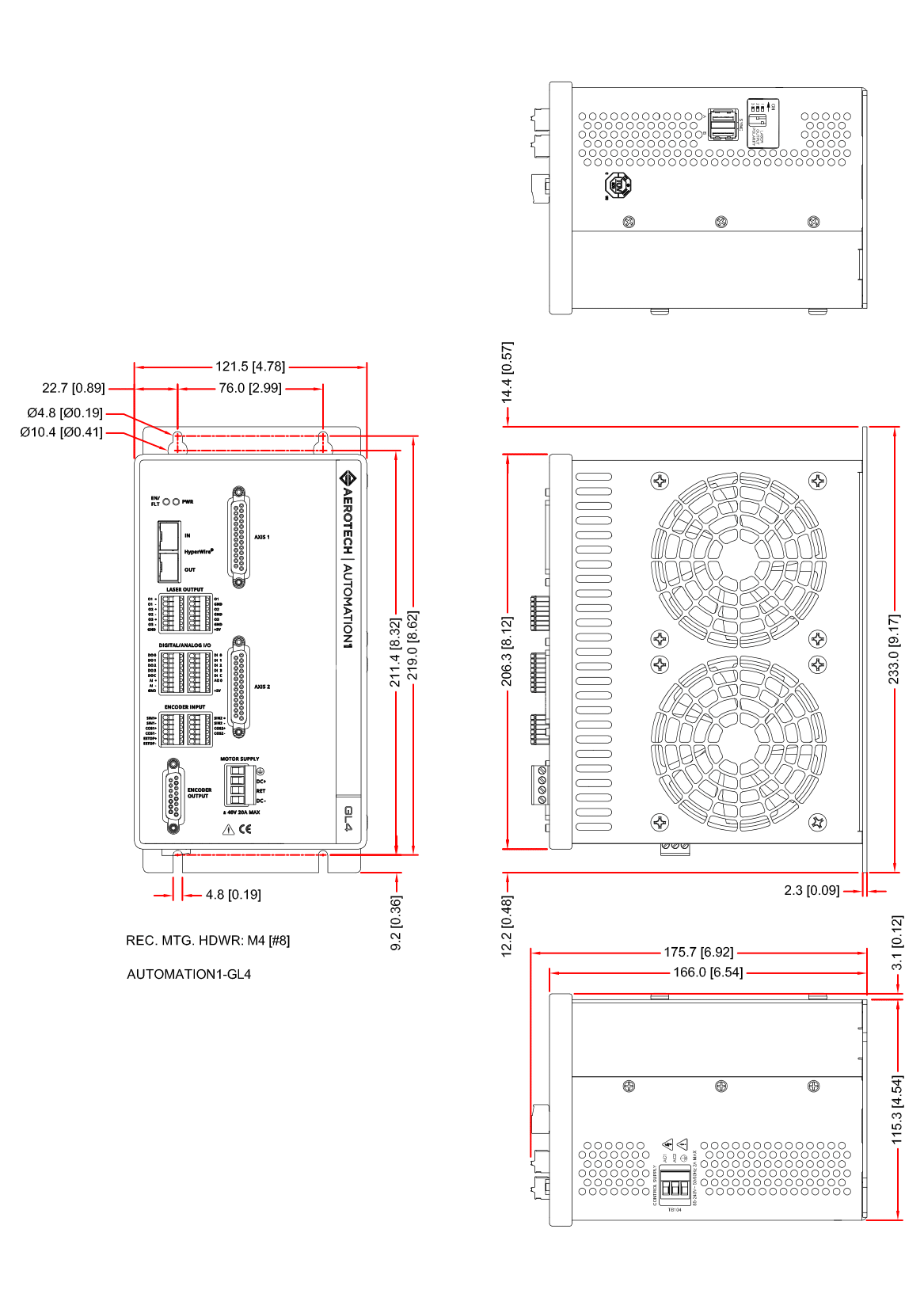
Dimensions
Automation1 GL4
Ordering Information
GL4 Series (Required)
| Option | Description |
| GL4 | Single-phase linear amplifier |
Current (Required)
| Option | Description |
| -20 | 20 A peak; 5 A continuous |
Optional Drive Enhancements
| Option | Description |
| -ESC0 | without Enhanced Scanner Control |
| -ESC1 | with Enhanced Scanner Control (for use with the AGVHPO) |
| -ESC2 | with Enhanced Scanner Control (for use with the AGVXPO) |