Automation1 XC6e Erweiteter, Hochleistungs-PWM-Servoantrieb
Der Automation1 XC6e Einachs-PWM-Servomotorantrieb ermöglicht eine präzise Bewegungssteuerung für Ihre Hochleistungsanwendungen. Er bietet alle Vorteile unseres XC4e-Antriebs, jedoch mit mehr Leistung, um die größten Nutzlasten zu bewegen. So können Sie große, bürstenlose Servomotoren schneller beschleunigen und höhere Höchstgeschwindigkeiten erreichen, ohne auf eine gleichmäßige Bewegung zu verzichten. Außerdem kann der XC6e mit der benutzerfreundlichen Studio-Anwendung und den APIs von Automation1 konfiguriert und programmiert werden. Der XC6e ist mit bürstenbehafteten, bürstenlosen, Schwingspulen- oder Schrittmotoren kompatibel und steuert außerdem problemlos Servo-, Galvo- und Piezomotoren.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Design-Merkmale
- Verbindung über den HyperWire®-Glasfaserbus (20-fache Bandbreite im Vergleich zu 100BASE-T-Ethernet-Bussen)
- Bietet eine Spitzenleistung von bis zu 100 Ampere
- Bietet 240 VAC und 480 VAC Spannungsoptionen
- Enthält einen STO-Sicherheitskreis (Safe Torque Off)
- Verfügt über ein Antriebsdatenfeld mit mehr als 67 MB Speicher
- CE-Zulassung; erfüllt die EU-Richtlinie 2015/863 RoHS 3. Anstehende NRTL-Sicherheitszertifizierung
- Bietet viele optionale Funktionen, darunter
- Positionssynchronisierter Ausgang für mehrere Achsen
- E/A-Erweiterungskarte
- 65K Encoder-Multiplikator für verstärkte Sinus-Encoder bis zu 2 MHz
Automation1
Der XC6e ist Teil der benutzerfreundlichen Automation1-Bewegungssteuerungsplattform, die Folgendes umfasst:
Gleichmäßige Bewegung
Mit dem optimierten Ansprechverhalten des XC6e-Servosystems, das bis zu sechzehn (16) Schleifenformungsfilter zweiter Ordnung, präzise zeitlich abgestimmte Vorwärtssteuerung und andere proprietäre Techniken umfasst, lassen sich extrem glatte Bewegungsprofile erzielen.
Zusätzliche Funktionen
Der Automation1 XC6e verfügt standardmäßig über die Funktionen, die Sie am meisten benötigen, wie z. B. Safe Torque Off (STO), ein Datenarray mit mehr als 16 Millionen 32-Bit-Elementen, digitale und analoge E/A, positionssynchronisierte Ausgänge (PSO), dedizierte Eingänge für den Referenzpunkt und das Ende des Verfahrwegs sowie eine verbesserte Strommessvorrichtung. Der Antrieb verfügt außerdem über eine interne Busspannungsüberwachung, einen Überspannungsschutz, einen integrierten 300-W-Shunt-Widerstand und integrierte Lüfter.
Einfache Integration
Die Integration des XC6e ist einfach, denn er verfügt über Funktionen wie automatische Steuerspannung, integrierte Encoder-Interpolationsoptionen, automatische Bremssteuerung, digitale und analoge E/A-Erweiterungskarte und standardmäßige Unterstützung für Absolutwertgeber.
Flexibilität bei der Rückmeldung
Der XC6e akzeptiert standardmäßig Rechteck- und Absolutwertgebersignale. Mit der optionalen Encoder-Multiplikator-Funktion können Sinus-Encoder mit bis zu 65.536 multipliziert werden, was den XC6e zu unserem höchstauflösenden Positionsrückmeldungsantrieb macht. Zweifach multipliziertes und zweifach absolutes Encoder-Feedback wird unterstützt.
Steuern Sie Ihren Prozess
Die XC6e ist mehr als ein Gerät zur Bewegungssteuerung. Er umfasst auch viele Prozesssteuerungsfunktionen. Ausgestattet mit der PSO-Funktionalität (Position Synchronized Output) von Aerotech kann eine einachsige XC6e bis zu drei Encoder in Echtzeit verfolgen, um ein Prozesswerkzeug wie einen Industrielaser oder eine Kamera auszulösen.
Feature |
Description |
| Motor Style | Brush, brushless, voice coil, stepper_1 |
| Control Supply | 100-240 VAC; 50/60 Hz |
| Motor Supply | 240 VAC (three-phase), 50/60 Hz | 480 VAC (three-phase), 50/60 Hz |
| Bus Voltage_2 | 0-340 VDC | 340-680 VDC |
| PWM Frequency | 20 kHz_3 |
| Peak Output Current (1 sec)_4_5 | 50 Apk | 100 Apk | 10 Apk | 20 Apk | 30 Apk | 50 Apk | 100 Apk |
| Continuous Output Current_4_5 | 25 Apk | 50 Apk | 5 Apk | 10 Apk | 15 Apk | 25 Apk | 30 Apk at 20 KHz, 50 Apk at 10 KHz |
| Position Synchronized Output (PSO) | Standard: One-axis PSO (includes one-axis Part-Speed PSO) Optional: Two-axis PSO (includes two-axis Part-Speed PSO) Three-axis PSO (includes three-axis Part-Speed PSO) Two-axis Part-Speed PSO only Three-axis Part-Speed PSO only |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos and marker)* CW and CCW limits Hall effect sensor inputs (A, B and C) Analog motor temperature input (accepts digital) Brake output |
| 26-Pin Auxiliary Feedback Connector | High-speed differential inputs (encoder sin, cos and marker)* 4x optically isolated digital inputs 4x optically isolated digital outputs 1x 16-bit differential ±10 V analog input 1x 16-bit single-ended ±10 V analog output 2x optically isolated high-speed inputs *This channel is bidirectional and can be used to echo out encoder signals |
| Multiplier Options | MX0 Option: Primary Encoder: 40 million counts-per-second square-wave input. Auxiliary Encoder: 40 million counts-per-second square-wave input. MX2 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 40 million counts per second square-wave input MX3 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 450 kHz sine-wave input, encoder multiplier up to x16,384* *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | 1x additional PSO connection point 1x PSO synchronization input 16x digital inputs, optically isolated 16x digital outputs, optically isolated 3x analog inputs, 16-bit, differential, ±10 V 3x analog outputs, 16-bit, single-ended, ±10 V |
| Drive Array Memory | 67.1 MB (16,777,216 32-bit elements) |
| High-Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 |
| HyperWire Connections | 2x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1 A |
| Absolute Encoder | BiSS C Undirectional; EnDat 2.1; and EnDat 2.2 |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | Selectable through software (85-95% efficiency) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40°C |
| Storage Temperature | -30 to 85°C |
| Weight | 6.30 kg (13.89 lb) |
| Compliance | CE approved EU 2015/863 RoHS 3 directive, Pending NRTL safety certification |
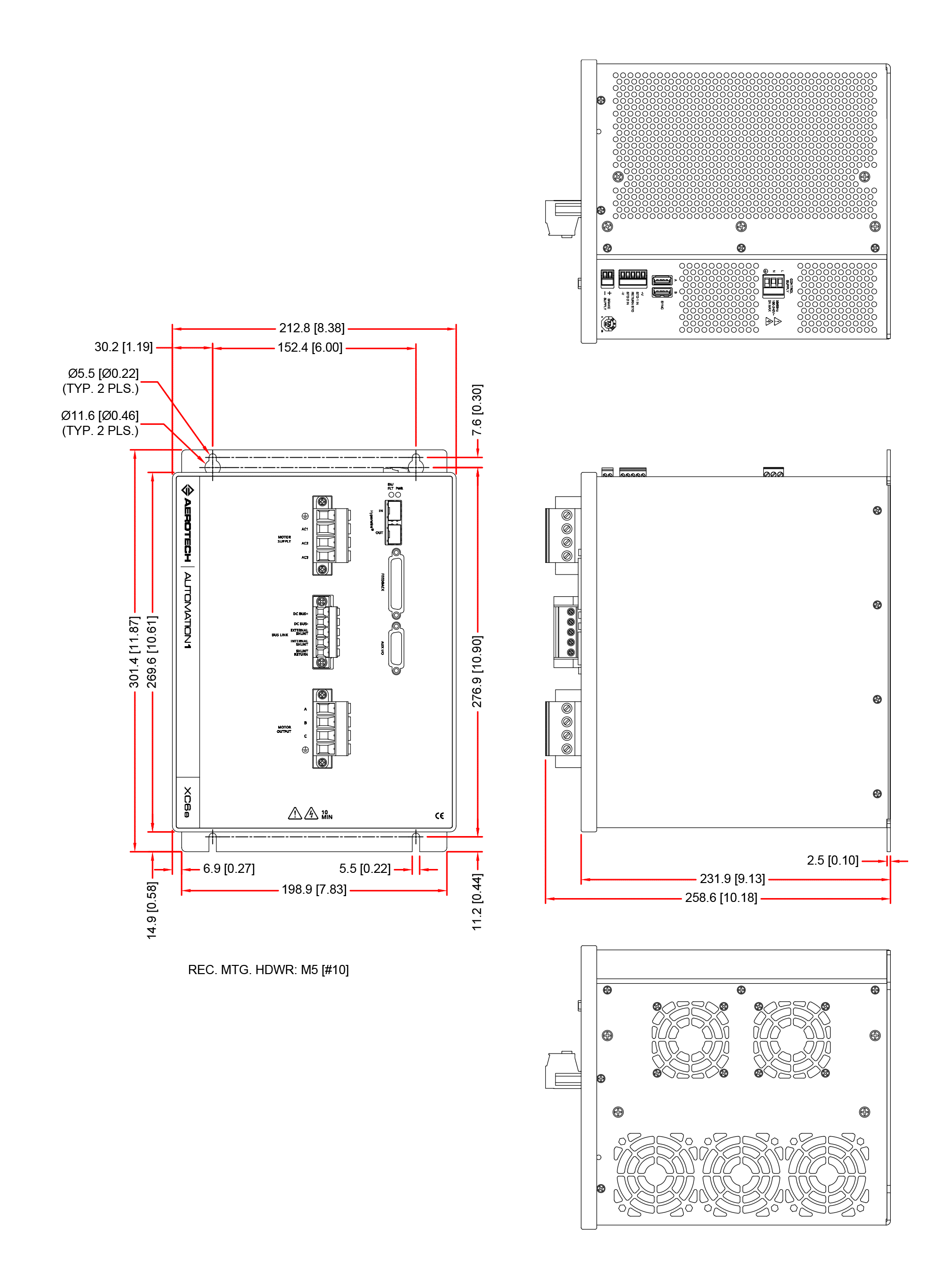
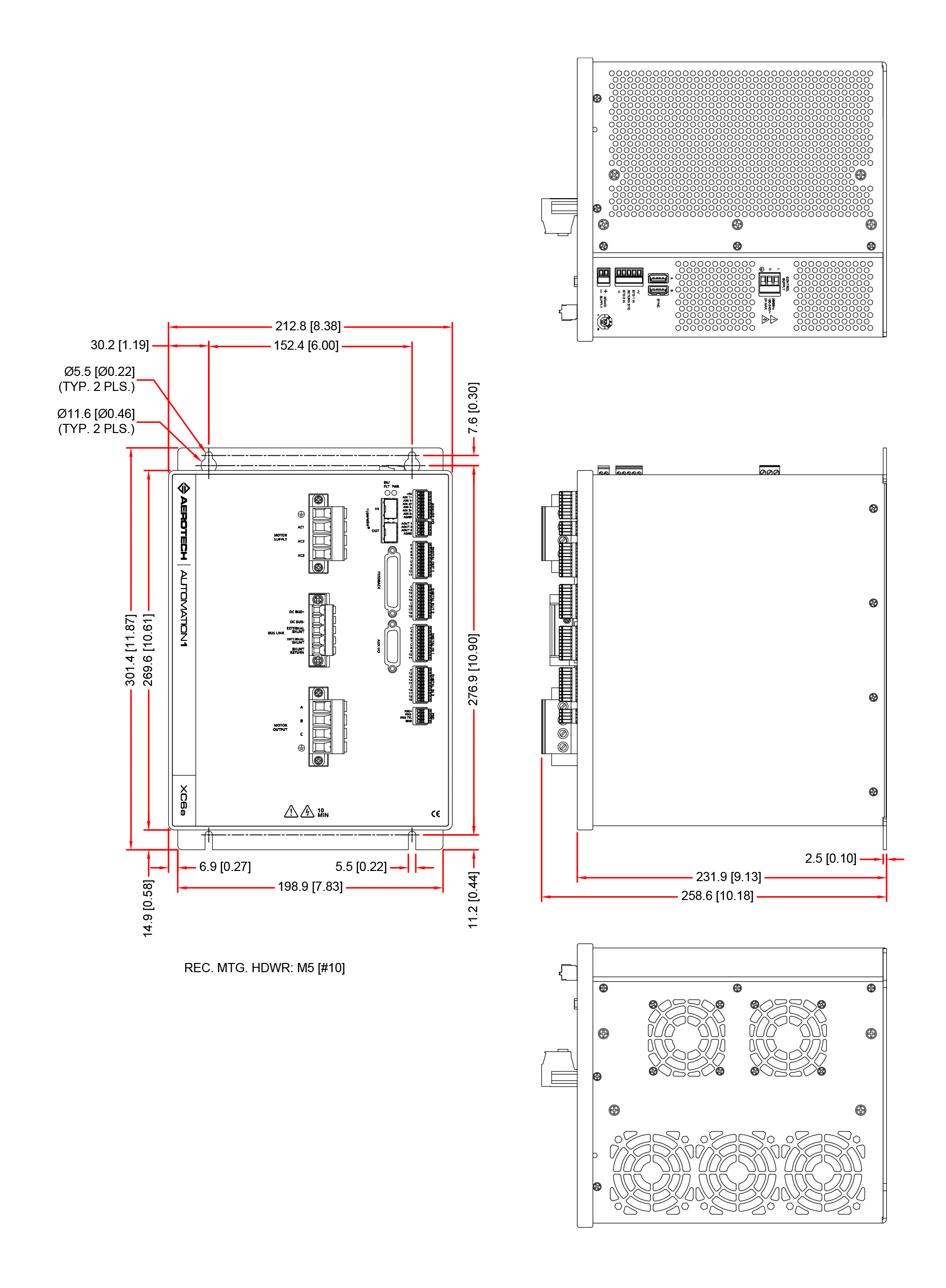
Dimensions
Automation1 XC6e, -EB0 Option
Automation1 XC6e, -EB1 Option
Ordering Information
XC6e
| Option | Description |
| XC6e | XC6e High-Powered PWM Digital Drive |
Peak Current
*Only available with 480 rated motor supply voltage
| Option | Description |
| -10* | 10 A peak, 5 A cont. current (480V input only) |
| -20* | 20 A peak, 10 A cont. current (480V input only) |
| -30* | 30 A peak, 15 A cont. current (480V input only) |
| -50 | 50 A peak, 25 A cont. current |
| -100 | 100 A peak, 50 A cont. current |
Rated Motor Supply Voltage
| Option | Description |
| -240V1 | 240 VAC Rated Motor Supply Voltage (50/100 Amp Versions) |
| -480V1 | 480 VAC Rated Motor Supply Voltage (50/100 Amp Versions) |
| -480V2 | 480 VAC Rated Motor Supply Voltage (10/20/30 Amp Versions) |
Expansion Board
| Option | Description |
| -EB0 | No expansion board (default) |
| -EB1 | IO expansion board |
Multiplier
| Option | Description |
| -MX0 | No encoder multiplier (default) |
| -MX2 | 2 MHz / 450 kHz x65536 multiplier (primary), no multiplier (auxiliary) |
| -MX3 | 2 MHz / 450 kHz x65536 multiplier (primary), 160 kHz x16384 multiplier (auxiliary) |
PSO
| Option | Description |
| -PSO1 | One-Axis PSO (includes One-Axis Part-Speed PSO) (default) |
| -PSO2 | Two-Axis PSO (includes Two-Axis Part-Speed PSO) |
| -PSO3 | Three-Axis PSO (includes Three-Axis Part-Speed PSO) |
| -PSO5 | Two-Axis Part-Speed PSO |
| -PSO6 | Three-Axis Part-Speed PSO |