Automation1 iXC2e Erweiterter, kompakter PWM-Servoverstärker mit Motion Controller
Der Automation1 iXC2e ist zwei Lösungen in einer: ein hochleistungsfähiger, kompakter PWM-Servomotorantrieb mit integriertem Motion-Controller – d.h. er ist in der Lage, eine komplette Maschinensteuerung zu übernehmen – und bietet darüber hinaus eine Positionssteuerung im Sub-Nanometer-Bereich für lineare oder rotierende Servomotoren, Voice-Coil-Motoren, Schrittmotoren oder jeden linearen oder rotierenden Präzisionstisch, der von einem dieser Motortypen angetrieben wird. Die Leistungsverstärker aus Siliziumkarbid (SiC) verfügen über eine ultrapräzise PWM-Schaltung, die eine hervorragende Motorsteuerungsleistung ermöglicht. Der leistungsstarke Automation1-iSMC-Motion-Controller wird direkt in dieselbe Hardware geladen, die auch den Antrieb steuert, der wiederum die Trajektorie für bis zu zwölf Achsen über den HyperWire-Motion-Bus verwaltet.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Design Features
- Erschließt die volle MOTION CONTROL-Leistung unseres intelligenten softwarebasierten Motion Controllers Automation1-iSMC
- Bietet die KOMPLETTE KONFIGURATION & LEISTUNGSFÄHIGKEIT des XC2e PWM-Servoantriebs
- Lokaler Antrieb mit 100 VDC BUS-Motorleistung und bis zu 10 AMPS PEAK-Ausgang.
- Eliminieren Sie den PC aus Ihrem Steuerungsschema
- Nutzen Sie bis zu 12 Achsen zur Steuerung, indem Sie weitere Automation1-Antriebe über den HyperWire-Glasfaserbus anschließen
- Beinhaltet PSO, das ULTIMATE DER POSITIONSBASIERTEN STEUERUNG für industrielle Laser, Kameras und mehr
- Funktionale Sicherheit durch SAFE TORQUE OFF (STO)
Automation1
Der iXC2e ist Teil der benutzerfreundlichen Automation1 Bewegungssteuerungsplattform, die Folgendes umfasst:
Steuern Sie Ihre gesamte Maschine
Der Motion Controller Automation1-iSMC, der in einem iXC2e-Antrieb eingesetzt wird, kann bis zu zwölf Achsen über den Automation1 HyperWire®-Kommunikationsbus steuern. Mit diesem Gerät können Sie wirklich eine komplette Maschine oder Anlage steuern. Alle Achsen werden eng mit anderen Achsen im Netzwerk koordiniert, um eine konturierte Bewegung und eine einzige, einfache Maschinensteuerungsarchitektur zu ermöglichen.
Erweitern Sie Ihre E/A
Konfigurieren Sie die Automation1-iSMC mit den entsprechenden industriellen Ethernet-Optionen und schließen Sie zusätzliche Geräte von Drittanbietern an, um Ihre Steuerungsarchitektur zu vervollständigen.
Alle Vorteile des leistungsstarken XC2e
Der iXC2e hat absolut keine Leistungseinbußen bei den Servomotoren, selbst wenn er mit dem kompletten Motion Controller betrieben wird. Datenerfassungsgeschwindigkeiten und -volumen bleiben gleich. Die Leistungsverstärkerschaltung arbeitet weiterhin mit maximal 100 VDC und 10 A Spitzenstrom.
Prozesssteuerungsfunktionen wie zusätzliche E/A und Aerotechs ultraschneller positionssynchronisierter Ausgang (PSO) mit geringer Latenzzeit sind weiterhin als Optionen verfügbar. Das bedeutet, dass Prozesse, die um den iXC2e herum aufgebaut sind, eine bessere Bewegungs- und Prozessleistung aufweisen - und das alles ohne PC.
Vorwärtsgerichtete Konstruktion
Zu den Standardmerkmalen eines iXC2e-Antriebs gehören STO, ein Datenarray mit mehr als 16 Millionen 32-Bit-Elementen, dedizierte Eingänge für den Referenzpunkt und das Endanschlagssignal sowie ein verbessertes Strommessgerät. Die Standard-Encoder-Unterstützung umfasst Rechteck- und Absolut-Encoder.
Erweitern Sie Ihren iXC2e mit einer Erweiterungskarte, die analoge und digitale E/A, einen zusätzlichen Encodereingang und einen dedizierten PSO enthält.
Erweitern Sie Ihre Prozesssteuerungsfunktionen mit einer der vielen Mehrachsen-PSO-Optionen. Verbessern Sie die Auflösung von verstärkten Sinuswellen-Drehgebern durch Hinzufügen eines Rückkopplungsmultiplikators, einschließlich der Unterstützung von Doppelschleifenmultiplikatoren.
Einfache Rückmeldung
Der Standard-Feedback-Anschluss von Aerotech ist ein 25-poliger DB-25-Stecker, der einen einfachen Anschluss aller Feedback-Signale von einer Kombination aus Servomotor und Präzisionstisch über ein einziges Kabel ermöglicht. Der iXC2e wird mit oder ohne integriertem Encoder-Multiplikator angeboten, was eine flexible Gestaltung je nach der für Ihre Anwendung erforderlichen Auflösung ermöglicht. Die Unterstützung von Absolutwertgebern ist ein Standardmerkmal.
Bereit zum Anschluss
HyperWire macht es einfach, den iXC2e in einer Mehrachsenkonfiguration mit anderer Automation1-Antriebshardware zu verbinden. Ein 24-Volt-Bremsausgang mit einem Ampere ist im Lieferumfang enthalten. Das Gerät ist CE-geprüft, NRTL-sicherheitszertifiziert und nach der RoHS-3-Richtlinie EU 2015/863 zertifiziert. Die Bandbreite des Leistungsverstärkers ist per Software wählbar und hat einen Wirkungsgrad von bis zu 95 Prozent.
Erfassen von Prozessdaten
Der iXC2e erfasst mehrere Signale und Datenelemente, die wertvolle Diagnose- und Leistungsinformationen liefern. In Verbindung mit der HyperWire-Bandbreite von zwei Gbit/s können Sie die erforderlichen Daten an den iSMC übertragen und über die Automation1 Studio-Anwendung oder die .NET-Programmierschnittstelle (API) einfach abrufen. Im Gegensatz zu anderen Plattformen müssen Sie Ihre Trajektorienraten nicht verringern, um diese wertvollen Daten zu erfassen.
Von der Busspannung über die Stromrückführung bis hin zu Positionsfehlern während der Teilebearbeitung erzeugt der Automation1 iXC2e einen konstanten Datenstrom. Sie können diese Daten nutzen, um die Leistung Ihres Antriebs zu überwachen.
Ausgezeichnete In-Position-Leistung
Dank fortschrittlichster Steuerungstechniken und Feedback-Signalverarbeitung kann der iXC2e die In-Position-Performance Ihres Tisches auf weniger als 0,18 Nanometer rms steuern.
Sehen Sie, wie Automation1 Servoantriebe die Positionsstabilität verbessern.
Category |
Specification |
| Motion Controller (1) | Aerotech’s Automation1-iSMC Intelligent Software-Based Motion Controller (version 2.2 and above) |
| Motor Style | Brush, brushless, voice coil, stepper(2) |
| Control Supply | 24 VDC |
| Motor Supply | 15-100 VDC |
| Bus Voltage(3) | 15-100 VDC |
| PWM Frequency | 20 kHz |
| Peak Output Current (1 sec)(4) | 10 Apk |
| Continuous Output Current(4) | 5 A |
| Position Synchronized Output (PSO) |
Standard: One-axis PSO (includes one-axis Part-Speed PSO)* Optional: Two-axis PSO (includes two-axis Part-Speed PSO)* Two-axis Part-Speed PSO only* Three-axis Part-Speed PSO only* *Requires adding an expansion board to the drive to output PSO pulses via a physical connection. |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos & marker) CW and CCW limits Hall effect sensor inputs (A, B & C) Analog motor temperature input (accepts digital) Brake output |
| Multiplier Options | MX0 option: Primary encoder: 40 million counts per second square-wave input Auxiliary encoder: 40 million counts per second square-wave input MX2 option: Primary encoder: 2 MHz/450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary encoder: 40 million counts per second square-wave input MX3 option: Primary encoder: 2 MHz/450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary encoder: 450 kHz sine-wave input, encoder multiplier up to x16,384* *Encoders multiplied with this input cannot be echoed out |
| I/O Expansion Board (-EB1) | PSO output connector with up to 12.5 MHz output rate Auxiliary Encoder Port 1x 16-bit differential, ±10 V analog input 1x 16-bit single-ended, ±10 V analog output 8x optically isolated digital inputs 8x optically isolated digital outputs |
| I/O Expansion Board (-EB2) | PSO output connector with up to 12.5 MHz output rate Auxiliary Encoder Port 2x Industrial Ethernet Ports |
| Drive Array Memory | 67.1 MB (16,777,216 32-bit elements) |
| High Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes (SIL3/PLe/Cat 4) |
| HyperWire Connections | 1x HyperWire small form-factor pluggable (SFP) port |
| Automatic Brake Control | Standard (24 V at 0.5 A) |
| Absolute Encoder | Renishaw Resolute BiSS; EnDat 2.1; EnDat 2.2, and SSI |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | 2500 Hz maximum (software selectable) |
| Power Amplifier Efficiency | 85-95%(5) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40 °C |
| Storage Temperature | -30 to 85 °C |
| Weight | 0.54 kg (1.20 lb.) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
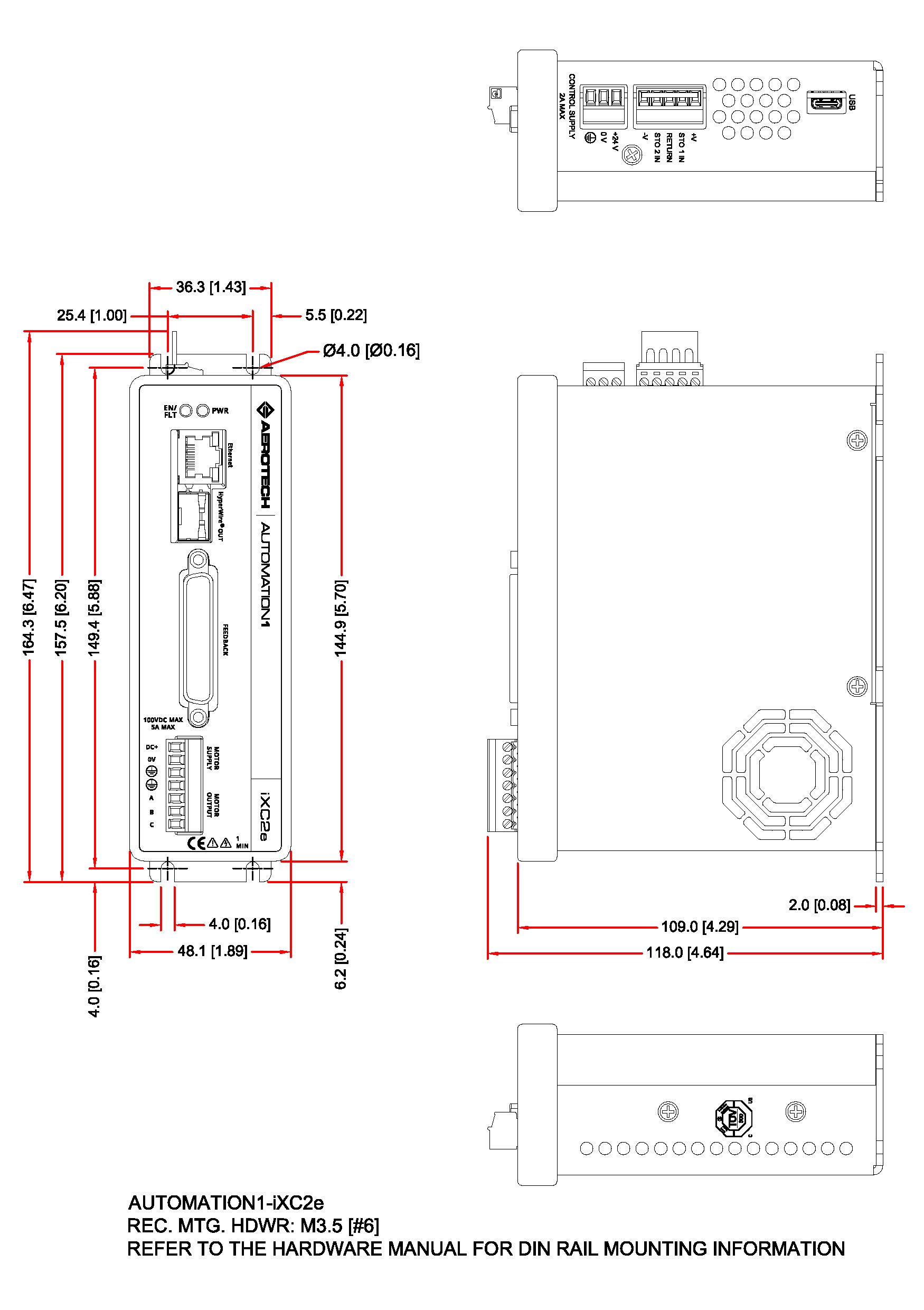
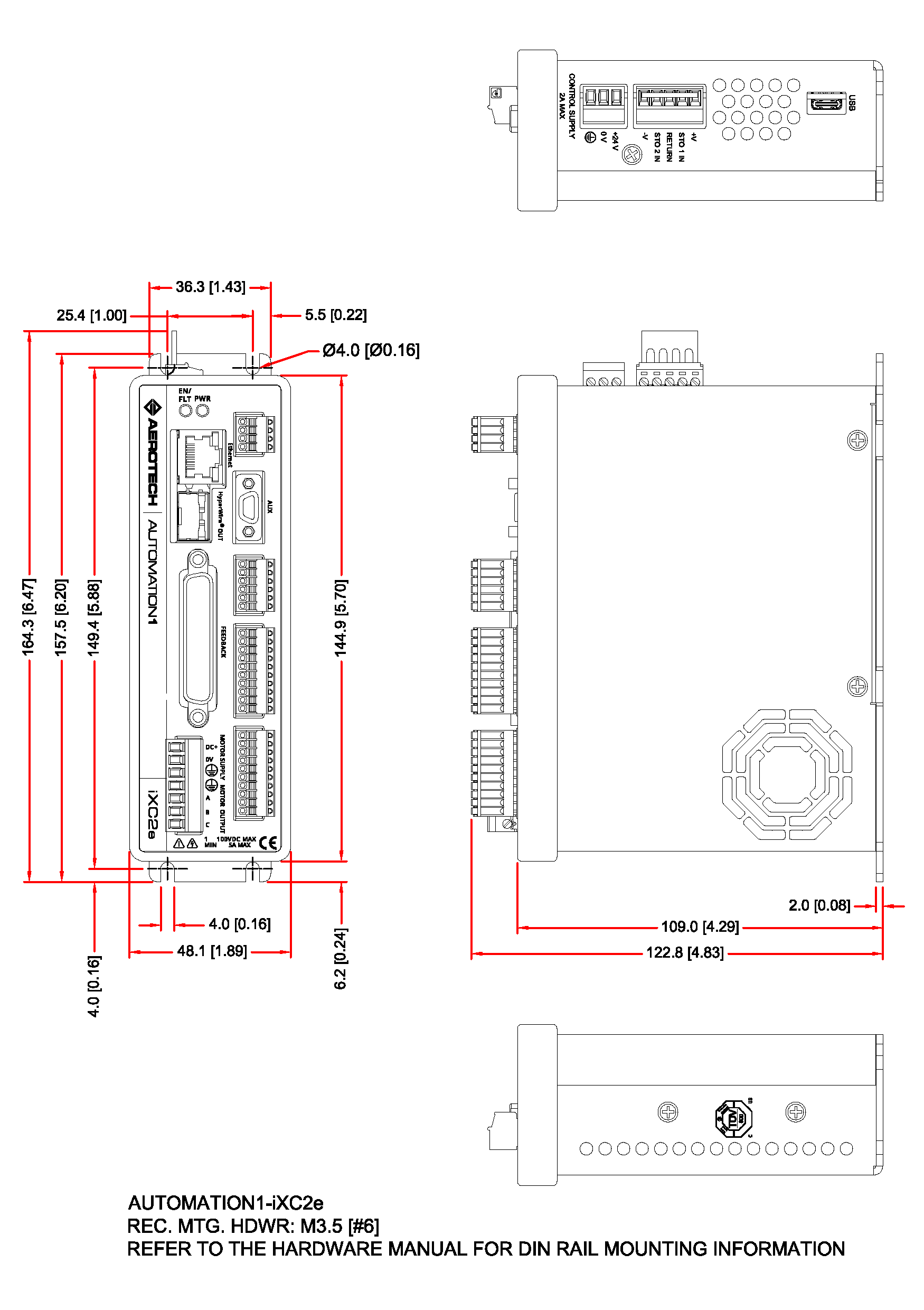
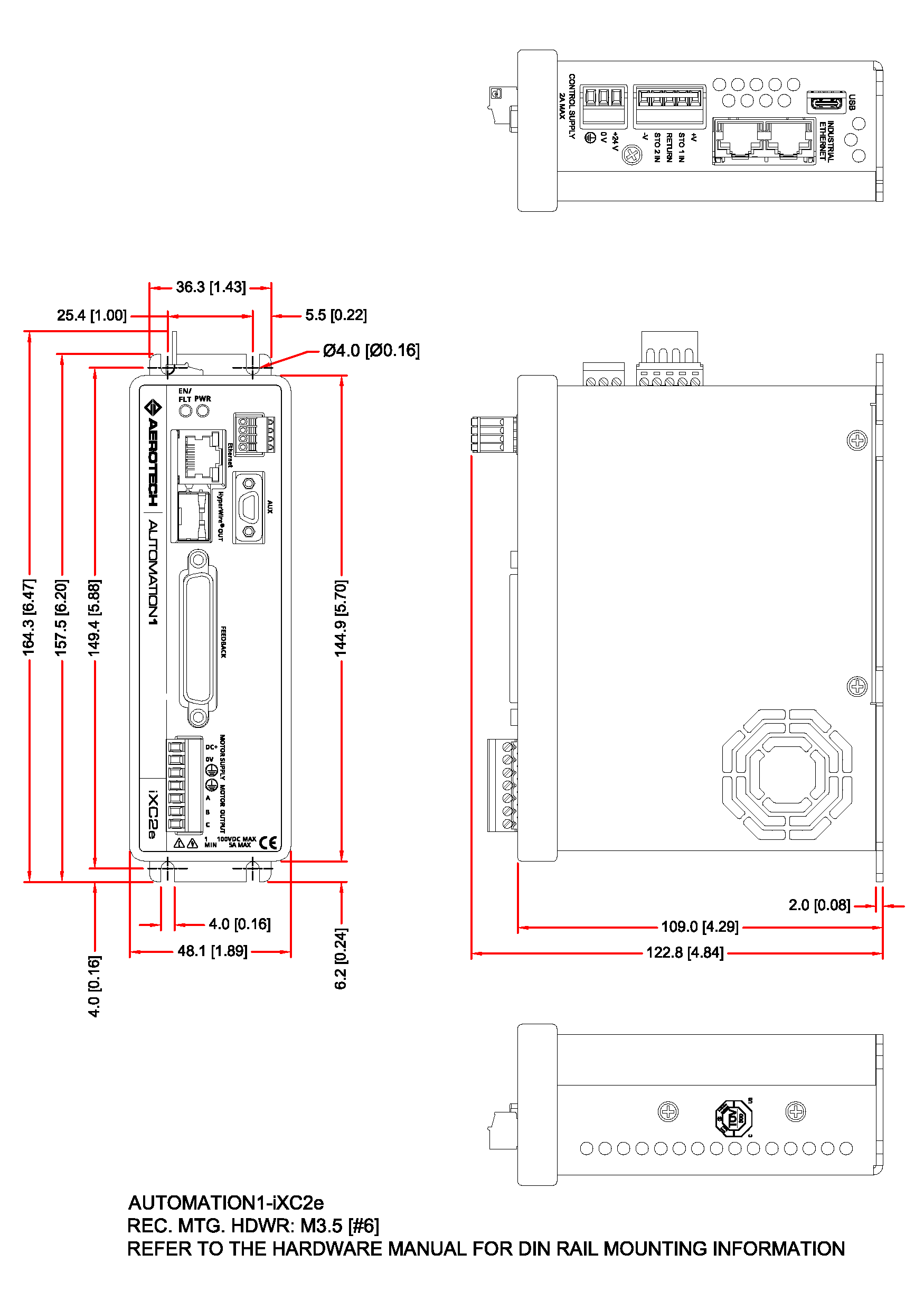
Dimensions
Automation1 iXC2e, -EB0 Option
Automation1 iXC2e, -EB1 Option
Automation1 iXC2e, -EB2 Option
Ordering Information
Automation1 iXC2e Ordering Options
Automation1 iXC2e
| Option | Description |
| Automation1 iXC2e | Automation1 iXC2e - Enhanced, Compact PWM Servo Drive with Motion Controller |
Peak Current
| Option | Description |
| -10 | 10 A peak, 5 A cont. current (default) |
Amplifier Type
| Option | Description |
| -PWM+ | With PWM+ Amplifier |
Expansion Board
| Option | Description |
| -EB0 | No expansion board (default) |
| -EB1 | Expansion board with analog/digital I/O |
| -EB2 | Expansion board with industrial Ethernet ports |
Multiplier
| Option | Description |
| -MX0 | No encoder multiplier (default) |
| -MX2 | x65536 multiplier (primary), no multiplier (auxiliary) |
| -MX3 | x65536 multiplier (primary), x16384 multiplier (auxiliary) |
PSO(1)
| Option | Description |
| -PSO1 | One-axis PSO (includes one-axis Part-Speed PSO) (default) |
| -PSO2 | Two-axis PSO (includes three-axis Part-Speed PSO) |
| -PSO5 | Two-axis Part-Speed PSO |
| -PSO6 | Three-axis Part-Speed PSO |
- 1. PSO functionality is included in the base iXC2e. The -EB1 board is required to use PSO logic to generate an output signal.
Automation1 PS2 Din Rail Power Supply Ordering Options
Automation1 PS2
| Option | Description |
| Automation1 PS2 | Automation1 PS2 - Din-rail mounted power supply for 1 to 4 compact servo drives |
Drive Type (Required)
| Option | Description |
| -D1 | PS2 for XC2, XC2e drives & iXC2e, iXC2 drive-based controllers |
| -D2 | PS2 for XL2e drives & iXL2e drive-based controllers |
Power Output (Required)
| Option | Description |
| -P1 | 240 watts at 24 VDC |
| -P2 | 240 watts at 48 VDC |
| -P3 | 480 watts at 48 VDC |
| -P4 | 480 watts at 96 VDC |
| -P5 | 240 watts at +/-12 VDC (10A) |
| -P6 | 240 watts at +/-24 VDC (5A) |
| -P7 | 480 watts at +/-48 VDC (5A) |
Number of Axes (Required)
| Option | Description |
| -AX01 | 1 axis of wiring |
| -AX02 | 2 axis of wiring |
| -AX03 | 3 axis of wiring |
| -AX04 | 4 axis of wiring |