Automation1 iXC4e Erweiteter, PWM-Servoverstärker mit Motion Controller
Der erweiterte PWM-Servoantrieb iXC4e mit Motion Controller ist die richtige Wahl für Ihre Präzisionsmaschine oder Ihr System. Er beginnt mit überlegener Motion-Control-Technologie. Der Automation1 iSMC (separat konfiguriert und auf dem iXC4e installiert) enthält Technologie, die früher High-End-PC-basierten Architekturen vorbehalten war.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Design-Merkmale
- Schöpfen Sie die volle Motion-Control-Leistung unseres intelligenten softwarebasierten Motion-Controllers Automation1 iSMC aus
- Umfassende Konfigurations- und Leistungsfähigkeiten des XC4e-Servomotors
- Eliminieren Sie den PC aus Ihrem Steuerungsschema
- Steuerung von bis zu 12 Achsen durch Anschluss weiterer Automation1-Antriebe über den HyperWire-Lichtwellenleiter-Bus
- Erweitern Sie Ihre E/A durch Hinzufügen von Erweiterungskarten zum iXC4e oder zu anderen angeschlossenen Antrieben
Motion. Control. Together.
Der Automation1-iXC4e, eine Hardware-Plattform für den Betrieb des intelligenten softwarebasierten Motion Controllers Automation1-iSMC, verfügt über einen Servomotorantrieb. Das bedeutet, dass sie in der Lage ist, die gesamte Maschinensteuerung auszuführen, als Servoantrieb für eine einzelne Achse zu fungieren und bis zu 11 zusätzliche Bewegungsachsen über unseren faseroptischen HyperWire-Bewegungsbus zu steuern. Die Kombination dieser Technologie in einem einzigen Hardware-Gerät senkt Ihre Maschinenkosten, reduziert die Maschinengröße und erhöht die Zuverlässigkeit.
Der iSMC, der auf dem iXC4e läuft, ist in AeroScript über die Anwendung Automation1 Studio und mehrere verfügbare APIs programmierbar.
Automation1
Der iXC4e ist Teil der benutzerfreundlichen Automation1-Bewegungssteuerungsplattform, die Folgendes umfasst:
Der erweiterte PWM-Servoantrieb iXC4e mit Motion Controller ist die richtige Wahl für Ihre Präzisionsmaschine oder Ihr System. Er beginnt mit einer überlegenen Motion-Control-Technologie. Der Automation1-iSMC (separat konfiguriert und auf dem iXC4e installiert) enthält Technologie, die früher High-End-PC-basierten Architekturen vorbehalten war.
Das ist aber nicht der einzige Grund, warum der iXC4e eine neue Dimension darstellt. Er enthält auch unseren einachsigen PWM-Digitalantrieb XC4e - im selben kompakten Gehäuse. Sie können außerdem bis zu 11 zusätzliche Achsen über den HyperWire® Glasfaser-Bewegungsbus steuern.
Der iSMC-Controller kann mit jedem anderen Automation1-Servomotorantrieb verbunden werden und diesen steuern und regeln. Der iXC4e und zusätzliche Servomotorantriebe können mit E/A-Erweiterungskarten konfiguriert werden, wodurch der iSMC-Controller die erforderliche Konnektivität erhält, um die volle Kontrolle über Ihre Maschine oder Anlage zu übernehmen.
Die PWM-Verstärker des iXC4e steuern bürstenlose DC-, bürstenbehaftete DC-, Voice Coil- oder Schrittmotortypen mit einer Betriebsspannung von bis zu 340 VDC und einer Spitzenstromfähigkeit von 30 A. Die Stromschleife und die Servoschleife werden digital bei 20 kHz geschlossen, wodurch ein Höchstmaß an Positioniergenauigkeit und Wiederholbarkeit gewährleistet wird. Die digitale und analoge Datenerfassung und Positionserfassung erfolgt mit denselben 20 kHz-Raten. Die Achs- und Prozessdaten werden schnell an den Motion Controller übermittelt und dort in Echtzeit verarbeitet.
Zu den Standardantriebsfunktionen des iXC4e gehören die sichere Drehmomentabschaltung (STO), ein Datenarray mit über 16 Millionen 32-Bit-Elementen (67 MB), digitale und analoge E/A (siehe Tabelle), ein positionssynchronisierter Ausgang (PSO) für eine Achse, dedizierte Eingänge für den Referenzpunkt und das Ende des Verfahrwegs sowie eine erweiterte Strommessvorrichtung. Die Encoder-Unterstützung umfasst Rechteck-, Sinus- und Absolut-Encoder.
Der Standard-iXC4e akzeptiert Rechteck-Encoder-Feedback mit einer Rate von bis zu 40 Millionen Zählungen pro Sekunde. Sinuswellen-Encoder können mit der optionalen Encoder-Multiplikator-Funktion mit bis zu 65.536 multipliziert werden, was eine Positionsrückmeldung mit der höchsten Auflösung ergibt. Zweifach multipliziertes Encoder-Feedback wird unterstützt. Jeder einachsige iXC4e kann mit dem MX2-Hochleistungs-Single-Encoder-Multiplikator oder dem MX3-Hochleistungs-Dual-Loop-Encoder-Multiplikator konfiguriert werden, was eine höhere Positions- und Geschwindigkeitssteuerung ermöglicht.
Wählen Sie aus einer Vielzahl von Erweiterungen der Basis-PSO-Funktionalität. Verfolgen Sie bis zu drei Encoder in Echtzeit mit PSO für drei Achsen oder erweitern Sie die PSO-Funktionalität auf kinematische Anordnungen mit der PSO-Funktion für Teilgeschwindigkeit.
Jeder antriebsbasierte Controller verfügt über eine optionale E/A-Erweiterungskarte, die die Anzahl der E/A-Punkte erheblich erhöht. Diese E/A-Platine enthält einen dedizierten PSO-Ausgang und einen PSO-Synchronisationseingang, die häufig zur Synchronisierung der Prozesssteuerung mit einer externen modemgekoppelten Frequenz verwendet werden.
Plattform-Leistung
Der iXC4e ist mehr als nur Hardware. Er bietet Ihnen Zugang zur gesamten Leistungsfähigkeit der Automation1 Motion Control-Plattform. Dazu gehören das Automation1 Motion Development Kit (MDK), der intelligente softwarebasierte Controller (iSMC) und die leistungsstarke Programmiersprache AeroScript™ mit integrierter RS-274 G- und M-Code-Unterstützung. Der Automation1 iSMC kann auch über verschiedene Controller-APIs programmiert werden und bietet flexible Methoden zur Integration des iXC4e und der von ihm gesteuerten Maschinen und Achsen in Ihre Systemarchitektur.
Specification |
Description |
| Motion Controller(1) | Aerotech’s Automation1 iSMC Intelligent Software-Based Motion Controller (version 2.00 and above) |
| Motor Style | Brush, brushless, voice coil, stepper(2) |
| Motor Supply | Single-phase 0-240 VAC; 50/60 Hz |
| Control Supply | 100-240 VAC; 50/60 Hz |
| Bus Voltage(3) | 0-340 VDC |
| Peak Output Current (1 sec)(4) | 10 Apk | 20 Apk | 30 Apk |
| Continuous Output Current(4)(5) | 5 Apk | 10 Apk | 10 Apk |
| Position Synchronized Output (PSO) | Standard: One-axis PSO (includes one-axis part-speed PSO) Optional: Two-axis PSO (includes two-axis part-speed PSO) Three-axis PSO (includes three-axis part-speed PSO) Two-axis part-speed PSO only Three-axis part-speed PSO only |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos and marker) CW and CCW limits Hall effect sensor inputs (A, B and C) Analog motor temperature input (accepts digital) Brake output |
| 26-Pin Auxiliary Feedback Connector | High-speed differential inputs (encoder sin, cos and marker)* 4x optically isolated digital inputs 4x optically isolated digital outputs 1x 16-bit differential ±10 V analog input 1x 16-bit single-ended ±10 V analog output 2x optically isolated high-speed inputs *This channel is bidirectional and can be used to echo out encoder signal |
| Multiplier Options | MX0 Option: Primary Encoder: 40 million counts-per-second square-wave input Auxiliary Encoder: 40 million counts-per-second square-wave input MX2 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 40 million counts per second square-wave input MX3 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 450 kHz sine-wave input, encoder multiplier up to x16,384* *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | 1x additional PSO connection point 1x PSO synchronization input 16x digital inputs, optically isolated 16x digital outputs, optically isolated 3x analog inputs, 16-bit, differential, ±10 V 3x analog outputs, 16-bit, single-ended, ±10 V |
| Drive Array Memory | 16,777,216 32-bit elements (67 MB) |
| High-Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 |
| HyperWire Connections | 1x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1 A |
| Absolute Encoder | Renishaw resolute BiSS; EnDat 2.1; and EnDat 2.2 |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | Selectable through software (85-95% efficiency) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40°C |
| Storage Temperature | -30 to 85°C |
| Weight | 2.36 kg (5.20 lb) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
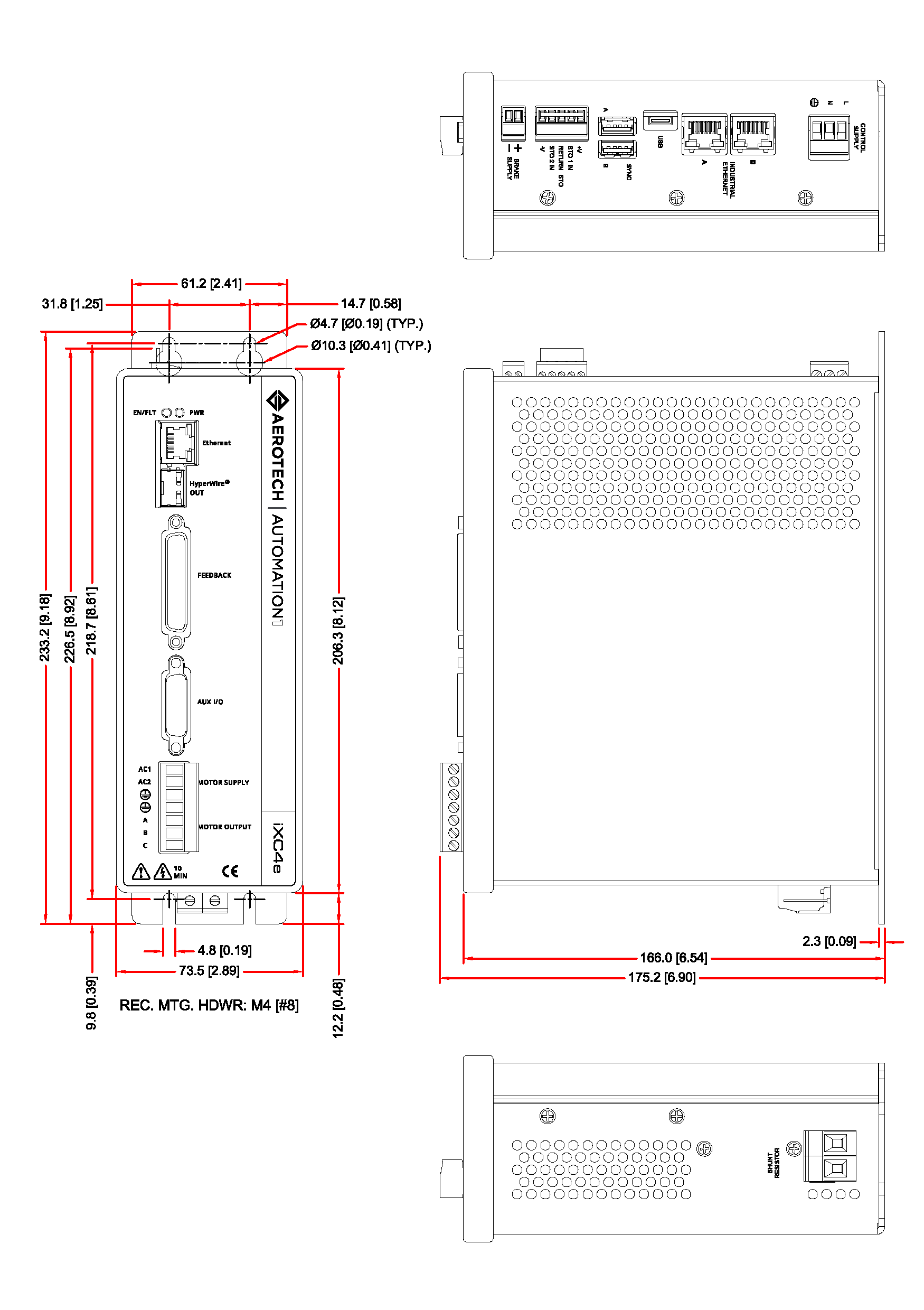
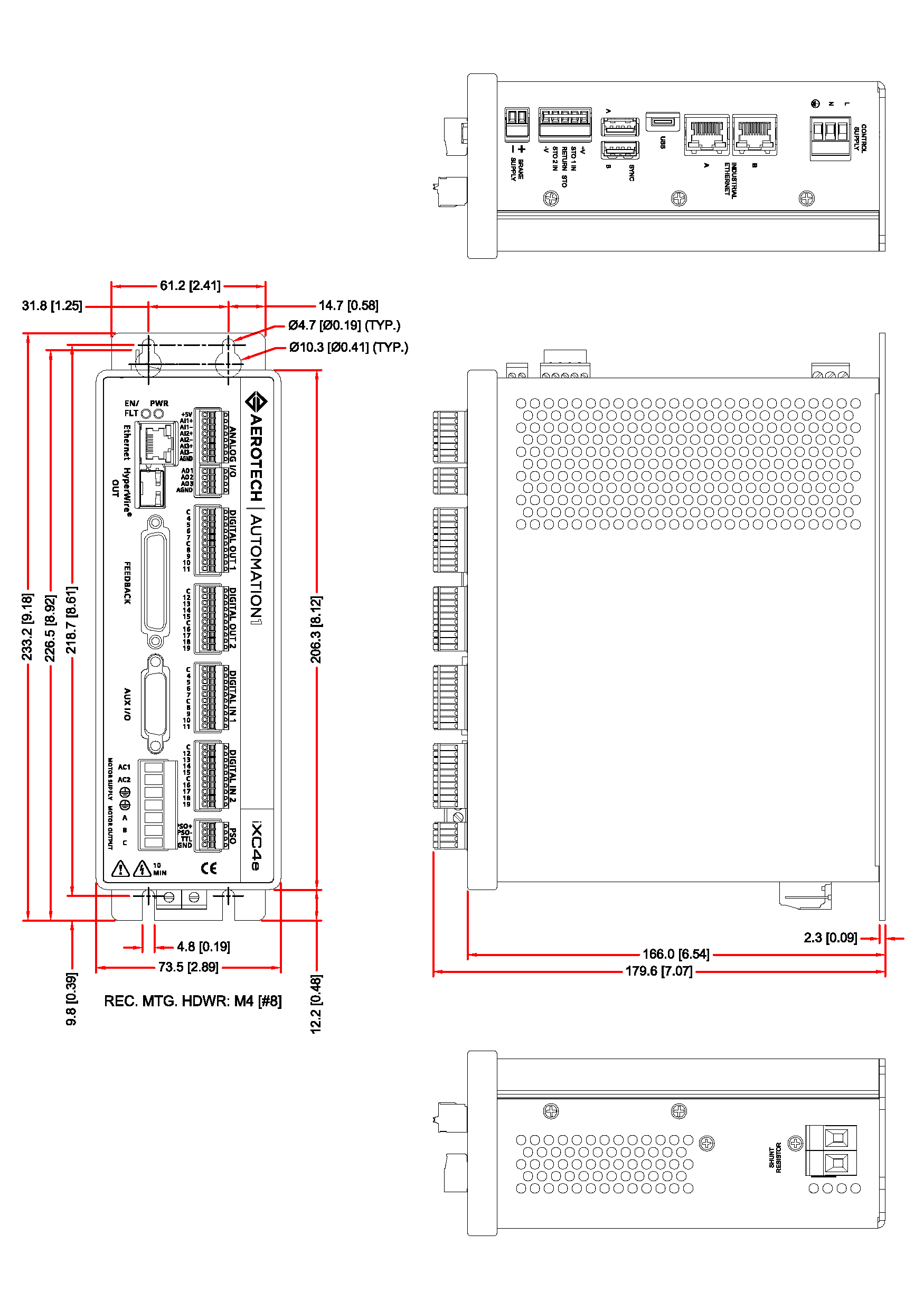
Dimensions
Automation1 iXC4e, -EB0 Option
Automation1 iXC4e, -EB1 Option
Ordering Information
Controller Configuration
| Description |
| To configure and load the motion controller on the iXC4e drive, please use configure and order an Automation1-iSMC intelligent controller with your iXC4e drive. The Automation1-iSMC configuration should include the iXC4e as the “hardware platform.” |
Automation1 iXC4e
| Option | Description |
| Automation1 iXC4e | PWM Servo Drive with Motion Controller |
Peak Current
| Option | Description |
| -10 | 10 A peak, 5 A cont. current (default) |
| -20 | 20 peak, 10 A cont. current |
| -30 | 30 A peak, 10 A cont. current |
Expansion Board
| Option | Description |
| -EB0 | No expansion board |
| -EB1 | IO expansion board |
Multiplier
| Option | Description |
| -MX0 | No encoder board (default) |
| -MX2 | 2 MHz x65536 multiplier (primary), no multiplier (auxiliary) 2 MHz / 450 kHz (bandwidth selectable) x16384 multiplier (primary), no multiplier (auxiliary) |
| -MX3 | 2 MHz x65536 multiplier (primary), 450 kHz x16384 multiplier (auxiliary) |
PSO
| Option | Description |
| -PSO1 | One-Axis PSO (default) |
| -PSO2 | Two-axis PSO |
| -PSO3 | Three-axis PSO |
| -PSO5 | Two-axis part-speed PSO |
| -PSO6 | Three-axis part-speed PSO |
External Shunt
| Option | Description |
| -SX0 | No 2-pin connector for external shunt (default) |
| -SX1 | 2-pin connector for external shunt |