Automation1 XC4e Erweiterter, PWM-Servoverstärker
Der digitale XC4e-PWM-Antrieb ist Aerotechs leistungsstärkster Ein-Achsen-Motorantrieb für Motion-Control-Anwendungen. Er bietet höchste Positionier- und Wiederholgenauigkeit, Schleifenschlussraten von bis zu 20 kHz sowie digitale und analoge E/A-Verarbeitung in Echtzeit, Datenerfassung, Prozesssteuerung und Encoder-Multiplikationsaufgaben.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Design-Merkmale
- Bestandteil der Automation1-Präzisions-Bewegungssteuerungsplattform von Aerotech
- Kompatibel mit A3200 Version 6.04 und neuer
- HyperWire®-Lichtwellenleiter-Schnittstelle
- Bis zu 30 A Spitzenausgangsstrom
- Integrale Spannungsversorgung
- Antrieb von bürstenbehafteten, bürstenlosen, Voice Coil- oder Schrittmotoren
- Sicherheitsschaltung STO (Safe Torque Off)
- Antriebs-Array bestehend aus mehr als 16 Millionen 32-Bit-Elementen
- Wahlweise zwei- oder dreiachsiger positionssynchronisierter Ausgang (PSO)
- Optionaler zwei- oder dreiachsiger Part-Speed PSO
- Optionales E/A-Erweiterungsboard
- Optionaler 65K-Gebermultiplikator für verstärkte Sinusgeber bis zu 2 MHz
- Hochauflösende digitale Strom-, Geschwindigkeits- und Positionsschleifen
- CE zugelassen, NRTL Sicherheitszertifizierung, EU 2015/863 RoHS 3 Richtlinie
Die PWM-Verstärker XC4e steuern bürstenlose DC-, bürstenbehaftete DC-, Voice Coil- oder Schrittmotortypen mit bis zu 320 VDC Betriebsspannung und 30 A Spitzenstrom. Die Stromschleife und der Servoregelkreis werden digital geschlossen, um ein Höchstmaß an Positioniergenauigkeit und Ratenstabilität zu gewährleisten. Dies ermöglicht Schleifenschlussraten von bis zu 20 kHz und erlaubt digitale und analoge E/A-Verarbeitung, Datenerfassung, Prozesssteuerung und Encoder-Multiplikationsaufgaben in Echtzeit.
Alle Versionen sind kompatibel mit der Motion-Plattform Automation 3200, die den HyperWire®-Motion-Bus nutzt.
Sehen Sie, wie Automation1-Servoantriebe die In-Position-Stabilität verbessern.
Zu den Standardfunktionen des XC4e gehören die sichere Drehmomentabschaltung (STO), ein Datenarray mit über 16 Millionen 32-Bit-Elementen, digitale und analoge E/A (siehe Tabelle), ein positionssynchronisierter Ausgang (PSO) für eine Achse, dedizierte Eingänge für den Referenzpunkt und das Ende des Verfahrwegs sowie eine erweiterte Strommessvorrichtung. Die Geberunterstützung umfasst Rechteck-, Sinus- und Absolutwertgeber.
>
Der Standard XC4e akzeptiert Rechteck-Encoder-Feedback mit Raten von bis zu 40 Millionen Zählungen pro Sekunde. Sinuswellen-Encoder können mit der optionalen Encoder-Multiplikator-Funktion mit bis zu 65.536 multipliziert werden, was die höchstauflösende Positionsrückmeldung von Aerotech ergibt. Doppelt vervielfachte Encoder-Rückmeldungen werden unterstützt.
Jeder einachsige XC4e-PWM-Digitalantrieb kann mit dem MX2-Hochleistungs-Single-Encoder-Multiplikator oder dem MX3-Hochleistungs-Dual-Loop-Encoder-Multiplikator bestellt werden, was eine höhere Positions- und Geschwindigkeitsregelung ermöglicht.
Auch eine Vielzahl von Erweiterungen der PSO-Basisfunktionalität sind verfügbar. Verfolgen Sie bis zu drei Encoder in Echtzeit mit dreiachsigem PSO oder erweitern Sie die PSO-Funktionalität auf kinematische Anordnungen durch den Einsatz von Aerotechs Part-Speed PSO-Funktion.
Jeder Antrieb verfügt über eine optionale E/A-Erweiterungsplatine, um die Anzahl der E/A-Punkte erheblich zu erhöhen. Diese E/A-Platine enthält einen dedizierten PSO-Ausgang und einen PSO-Synchronisationseingang, der häufig zur Synchronisierung der Prozesssteuerung mit einem externen modemgekoppelten Frequenzeingang verwendet wird.
Feature |
Description |
| Motor Style | Brush, brushless, voice coil, stepper_1 |
| Motor Supply | Single-phase 0-240 VAC; 50/60 Hz |
| Control Supply | 100-240 VAC; 50/60 Hz |
| Bus Voltage_2 | 0-340 VDC |
| Peak Output Current (1 sec)_3 | 10 Apk | 20 Apk | 30 Apk |
| Continuous Output Current(3)(4) | 5 Apk | 10 Apk | 10 Apk |
| Position Synchronized Output (PSO) | Standard: One-axis PSO (includes one-axis Part-Speed PSO) Optional: Two-axis PSO (includes two-axis Part-Speed PSO) Three-axis PSO (includes three-axis Part-Speed PSO) Two-axis Part-Speed PSO only Three-axis Part-Speed PSO only |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos, and marker)* CW and CCW limits Hall effect sensor inputs (A, B, and C) Analog motor temperature input (accepts digital) Brake output |
| 26-Pin Auxiliary Feedback Connector | High-speed differential inputs (encoder sin, cos and marker)* 4x optically isolated digital inputs 4x optically isolated digital outputs 1x 16-bit differential ±10 V analog input 1x 16-bit single-ended ±10 V analog output 2x optically isolated high-speed inputs *This channel is bidirectional and can be used to echo out encoder signal |
| Multiplier Options | MX0 Option: Primary Encoder: 40 million counts-per-second square-wave input. Auxiliary Encoder: 40 million counts-per-second square-wave input. MX2 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 40 million counts per second square-wave input MX3 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary Encoder: 450 kHz sine-wave input, encoder multiplier up to x16,384* *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | 1x additional PSO connection point 1x PSO synchronization input 16x digital inputs, optically isolated 16x digital outputs, optically isolated 3x analog inputs, 16-bit, differential, ±10 V 3x analog outputs, 16-bit, single-ended, ±10 V |
| Drive Array Memory | 16,777,216 32-bit elements |
| High-Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 |
| HyperWire Connections | 2x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1 A |
| Absolute Encoder | Renishaw resolute BiSS; EnDat 2.1; and EnDat 2.2 |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | Selectable through software (85-95% efficiency) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40°C |
| Storage Temperature | -30 to 85°C |
| Weight | 2.36 kg (5.20 lb) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
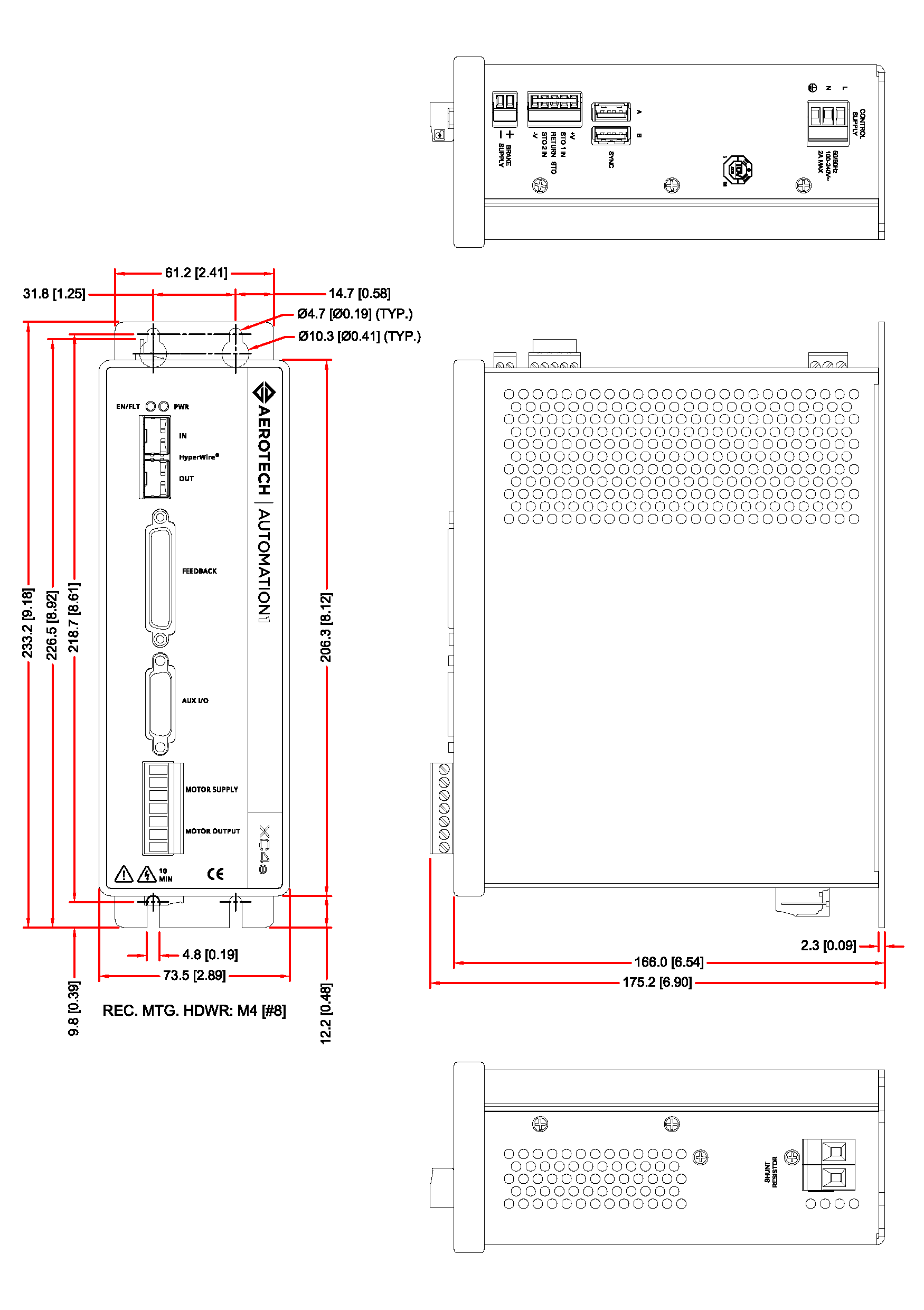
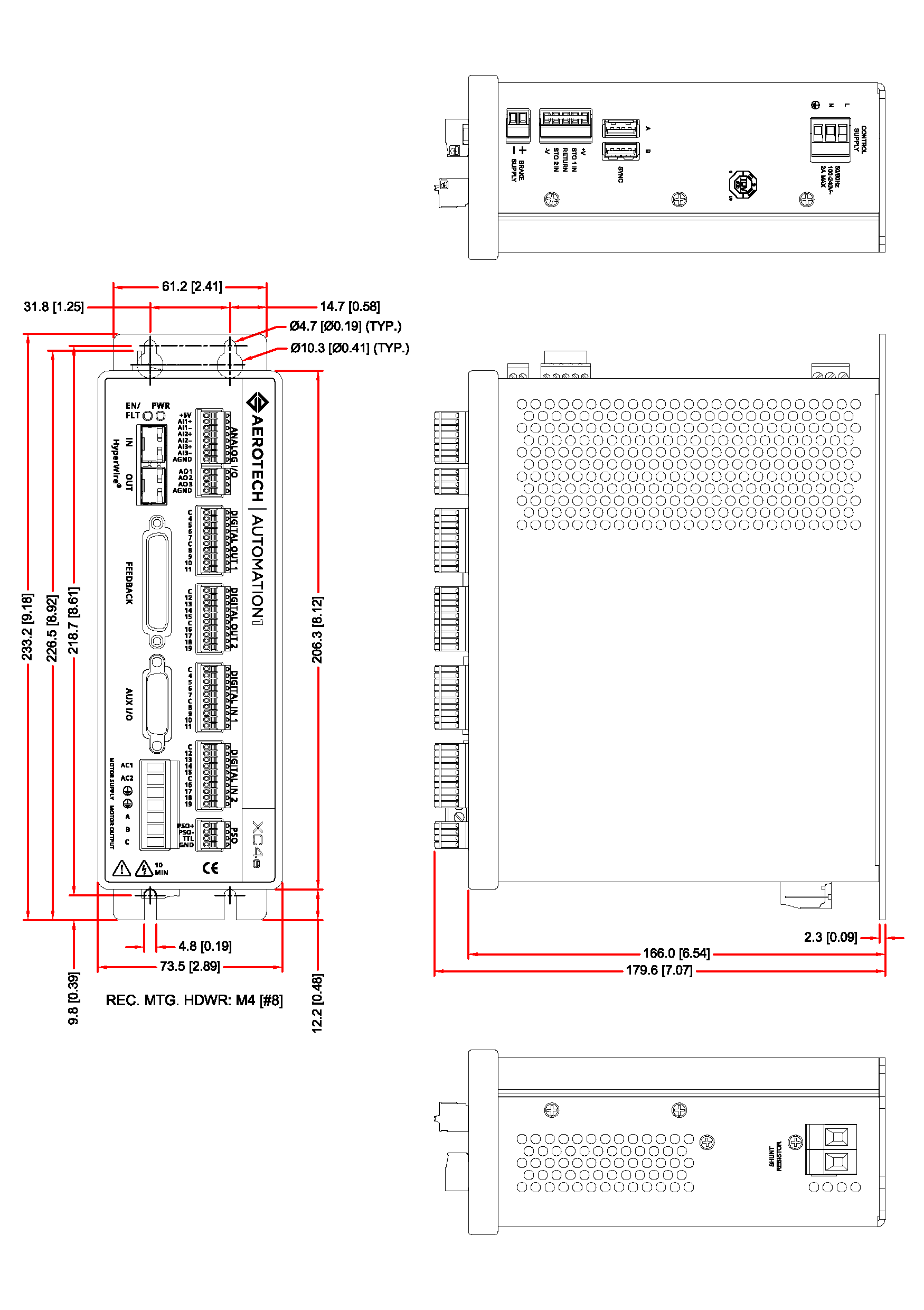
Dimensions
Automation1 XC4e, -EB0 Option
Automation1 XC4e, -EB1 Option
Ordering Information
XC4e
| Option | Description |
| XC4e | XC4e PWM digital drive |
Peak Current
| Option | Description |
| -10 | 10 A peak, 5 A cont. current (default) |
| -20 | 20 A peak, 10 A cont. current |
| -30 | 30 A peak, 10 A cont. current |
Expansion Board
| Option | Description |
| -EB0 | No expansion board (default) |
| -EB1 | IO expansion board |
Multiplier
| Option | Description |
| -MX0 | No encoder multiplier (default) |
| -MX2 | 2 MHz x65536 multiplier (primary), no multiplier (auxiliary) |
| -MX3 | 2 MHz x65536 multiplier (primary), 450 kHz x16384 multiplier (auxiliary) |
PSO
| Option | Description |
| -PSO1 | One-Axis PSO (default) |
| -PSO2 | Two-Axis PSO |
| -PSO3 | Three-Axis PSO |
| -PSO5 | Two-Axis Part-Speed PSO |
| -PSO6 | Three-Axis Part-Speed PSO |
External Shunt
| Option | Description |
| -SX0 | No 2-pin connector for external shunt (default) |
| -SX1 | 2-pin connector for external shunt |