Automation1 XL2e Erweiteter, kompakter Linear-Servoantrieb
Der Automation1 XL2e kombiniert hochwertige, rauscharme lineare Leistungsverstärker mit präziser Servosteuerungstechnologie in einem kompakten Formfaktor – und das ohne Abstriche bei unseren High-End-Steuerungsfunktionen. Ohne Schaltgeräusche oder Totzeit liefert er die hochpräzise Abtastung, die Sie für Anwendungen wie Wirbelstromprüfung, Sensortests und hochpräzise Positions- und Geschwindigkeitsverfolgung benötigen. Er ist auch ideal für Anwendungen mit kleinen Schrittgrößen und Positionsstabilität, da die Steuerung der Servomotoren zu 100 % der Zeit aktiv sein kann.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Konstruktionsmerkmale
- Einfache Integration in Mehrachsensysteme mit weiteren Automation1-Antrieben und iSMC motion controller
- Unterstützt standardmäßig Absolut-Encoder und Rechteck-Encoder
- Erhöht die Auflösung von Sinus-Feedback-Geräten mit optionalem x65.536 Encoder-Multiplikator
- Unterstützt optionales Dual-Multiplikator- und Dual-Absolutwert-Geber-Feedback
- Enthält PSO, die ultimative positionsgetriggerte Steuerung für industrielle Laser, Kameras und mehr
- Funktionale Sicherheit mit Safe Torque Off (STO) (Zertifizierung ausstehend)
- Bietet optionale E/A-Erweiterungskarte
Automation1
Die XL2e ist Teil der benutzerfreundlichen Automation1-Motion Control Plattform, die Folgendes umfasst:
Die XL2e bietet eine überragendere Leistung und ein durchdachteres Design als andere Produkte auf dem Markt. Das hochintegrierte Design umfasst Servo- und Stromsteuerungen, lineare Leistungsverstärker, Lüfter und Kühlkörper in einem einzigen Gehäuse. Die Auswahl hochwertiger Komponenten für den Leistungsverstärker und die Steuerschaltungen ermöglicht eine genauere Positionsnachführung, eine präzisere Positionsstabilität und kleinere Minimalschrittgrößen.
Zu den Standardmerkmalen gehören die sichere Drehmomentabschaltung (STO), ein Datenarray mit mehr als 67 MB Speicher, dedizierte Eingänge für den Referenzpunkt und das Ende des Verfahrwegs sowie ein verbessertes Strommess- und Regelschleife
Die XL2e arbeitet standardmäßig mit Rechteck- und Absolut Encodersignalen. Mit der optionalen Encoder-Multiplikator-Funktion können Sie Sinuswellen-Encoder mit bis zu 65.536 multiplizieren. Optional können zwei Encoder pro Drive ausgewertet werden.
Die XL2e ist mehr als nur ein Gerät zur Bewegungssteuerung - sie enthält auch viele Prozesssteuerungsfunktionen. Ausgestattet mit unserer PSO-Funktionalität kann ein einachsiger XL2e bis zu drei Encoder in Echtzeit verfolgen und damit ein Prozesswerkzeug wie einen Industrielaser oder eine Kamera zu triggern. Jeder XL2e kann mit einer optionalen E/A-Erweiterungskarte konfiguriert werden, die einen dedizierten PSO-Ausgang enthält, und PSO kann mit einem Synchronisationseingang verwendet werden, um die Prozesssteuerung mit einem externen mode-locked Frequenzeingang zu synchronisieren.
Zwei HyperWire-Anschlüsse ermöglichen die einfache Verbindung der XL2e mit anderer Automation1-Antriebshardware in einer Mehrachsenkonfiguration. Ein 24-Volt-Bremsausgang mit einem Ampere ist im Lieferumfang enthalten. Das Gerät ist CE-geprüft, NRTL-zertifiziert und nach der RoHS 3-Richtlinie EU 2015/863 zertifiziert. Die Bandbreite des Leistungsverstärkers ist per Software wählbar.
Feature |
Description |
| Position Synchronized Output (PSO) | Standard One-axis PSO: Command position synchronized output pulses based on distance calculated from a single encoder. Includes one-axis part-speed PSO.* Optional Two-axis PSO: Command position synchronized output pulses based on distance calculated from two encoders. Includes two-axis part-speed PSO.* Three-axis PSO: Command position synchronized output pulses based on distance calculated from three encoders. Includes three-axis part-speed PSO.* Two-axis part-speed PSO: Command position synchronized output pulses based on vector velocity command of up to two axes.* Three-axis part-speed PSO: Command position synchronized output pulses based on vector velocity command of three or more axes.* *Requires adding an expansion board to the drive to output PSO pulses via a physical connection. |
| 25-Pin Motor Feedback Connector | High-speed differential inputs (encoder sin, cos, marker and fault) CW and CCW limits Hall effect sensor inputs (A, B and C) Analog motor temperature input (accepts digital) Brake output |
| Multiplier Options | MX0 option: Primary encoder: 40 million counts per second square-wave input Auxiliary encoder: 40 million counts per second square-wave input (required EB1 expansion board) MX2 option: Primary encoder: 2 MHz/200 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary encoder: 40 million counts per second square-wave input (required EB1 expansion board) MX3 option: Primary encoder: 2 MHz/200 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to 65,536 Auxiliary encoder: 200 kHz sine-wave input, encoder multiplier up to x16,384 (required EB1 expansion board)* *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | PSO output connector with up to 12.5 MHz output rate Auxiliary Encoder Port 1x 16-bit differential, ±10 V analog input 1x 16-bit single-ended, ±10 V analog output 8x optically isolated digital inputs 8x optically isolated digital outputs |
| Available Power Supply | Automation1-PS2 (pending) |
| Drive Array Memory | 16,777,216 32-bit elements |
| High Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLE/Cat 4 (certification pending) |
| HyperWire® Connections | 2x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1.0 A |
| Absolute Encoder | BiSS C Unidirectional; EnDat 2.1; EnDat 2.2; SSI |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Operating Temperature | 0 to 40 °C |
| Storage Temperature | -30 to 85 °C |
| Weight | 1 kg (2.2 lb) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
Category |
XL2e-10 (±12 VDC) |
XL2e-10 (±20 VDC) |
XL2e-10 (±24 VDC) |
XL2e-10 (±40 VDC) |
XL2e-10 (±48 VDC) |
| Motor Supply - Input Voltage | +/-5VDC to +/-48 VDC | +/-5VDC to +/-48 VDC | +/-5VDC to +/-48 VDC | +/-5VDC to +/-48 VDC | +/-5VDC to +/-48 VDC |
| Motor Supply - Input Current (Continuous) | 5 Arms | 5 Arms | 5 Arms | 5 Arms | 5 Arms |
| Motor Supply - Input Current (Peak) | 10 Arms | 10 Arms | 10 Arms | 10 Arms | 10 Arms |
| Control Supply - Input Voltage | 24 VDC | 24 VDC | 24 VDC | 24 VDC | 24 VDC |
| Control Supply - Input Current | 2 A max, 1.0 A typical without brake | 2 A max, 1.0 A typical without brake | 2 A max, 1.0 A typical without brake | 2 A max, 1.0 A typical without brake | 2 A max, 1.0 A typical without brake |
| Nominal Motor Bus Voltage | Equals motor supply input voltage | Equals motor supply input voltage | Equals motor supply input voltage | Equals motor supply input voltage | Equals motor supply input voltage |
| Common Motor Supply Voltage | ±12 VDC | ±20 VDC | ±24 VDC | ±40 VDC | ±48 VDC |
| Continuous Output Current @ 25°C(1)(2)(3) | 5.0 Apk | 5.0 Apk | 3.3 Apk | 4.5 Apk | 2.7 Apk | 3.8 Apk | 1.6 Apk | 2.2 Apk | 1.3 Apk | 1.7 Apk |
| Peak Output Current (1 second)(6) | 10 Apk | 10 Apk | 10 Apk | 10 Apk | 10 Apk |
| Maximum Continuous Total Power Dissipation (3) | 180 W | 180 W | 180 W | 180 W | 180 W |
| Peak Amplifier Power Dissipation per Phase(5) | 400 W | 400 W | 400 W | 400 W | 400 W |
| Effective Heatsink Thermal Resistance | 0.25 C/W | 0.25 C/W | 0.25 C/W | 0.25 C/W | 0.25 C/W |
| Maximum Transistor Temperature | 75°C | 75°C | 75°C | 75°C | 75°C |
| Time to Reach Maximum Temperature at Maximum Continuous Power | 8 minutes | 8 minutes | 8 minutes | 8 minutes | 8 minutes |
| Current Loop Bandwidth | 2500 Hz (software selectable) | 2500 Hz (software selectable) | 2500 Hz (software selectable) | 2500 Hz (software selectable) | 2500 Hz (software selectable) |
| Minimum Load Resistance | 0 Ω | 0 Ω | 0 Ω | 0 Ω | 0 Ω |
| Minimum Load Inductance | 0 H | 0 H | 0 H | 0 H | 0 H |
| Modes of Operation | Brushless, brush, stepper | Brushless, brush, stepper | Brushless, brush, stepper | Brushless, brush, stepper | Brushless, brush, stepper |
| Protection Features | Peak current limit, over temperature, RMS current limit, dynamic power limit (SOA) | Peak current limit, over temperature, RMS current limit, dynamic power limit (SOA) | Peak current limit, over temperature, RMS current limit, dynamic power limit (SOA) | Peak current limit, over temperature, RMS current limit, dynamic power limit (SOA) | Peak current limit, over temperature, RMS current limit, dynamic power limit (SOA) |
| Encoder Supply | 5V @ 500 mA | 5V @ 500 mA | 5V @ 500 mA | 5V @ 500 mA | 5V @ 500 mA |
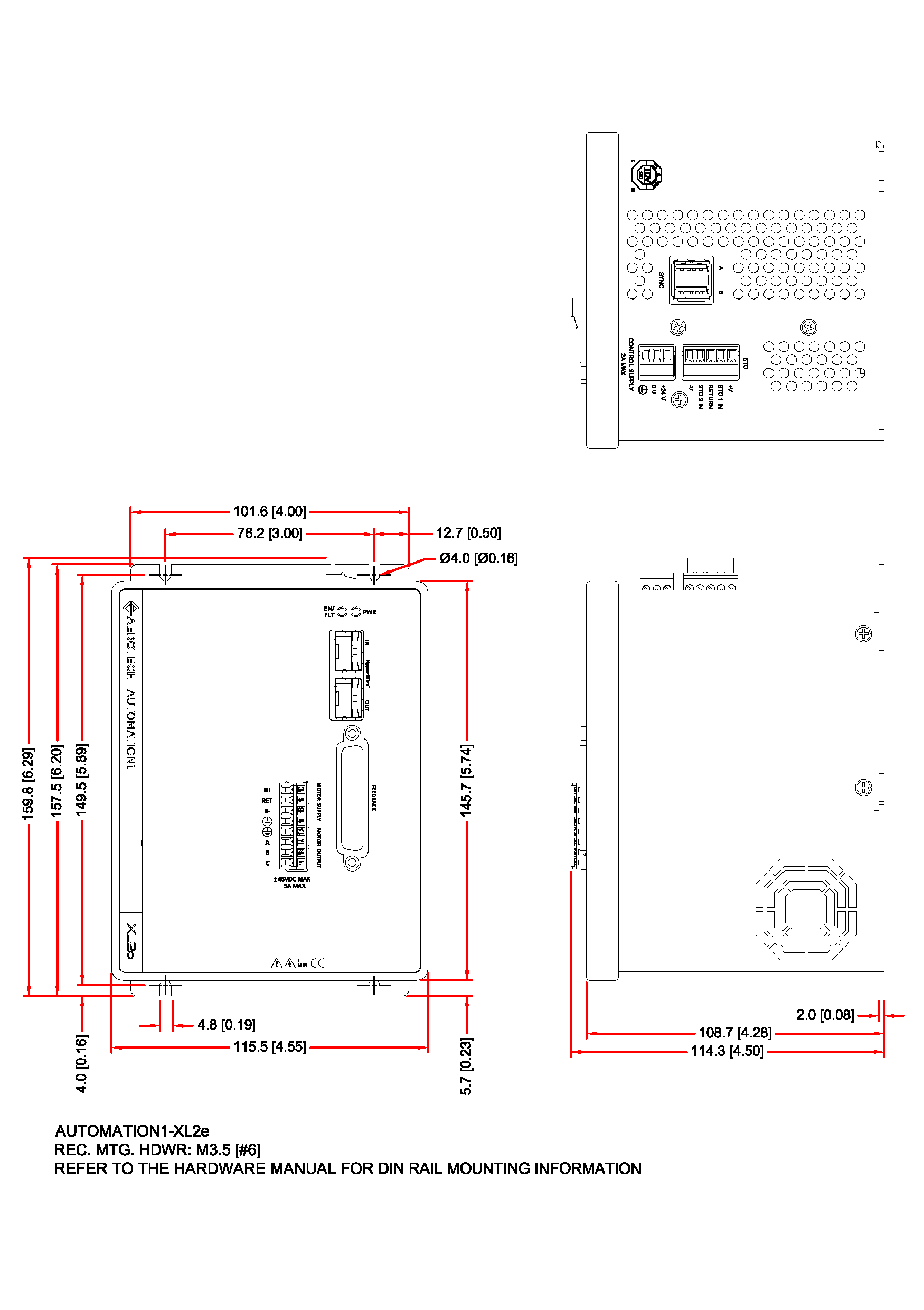
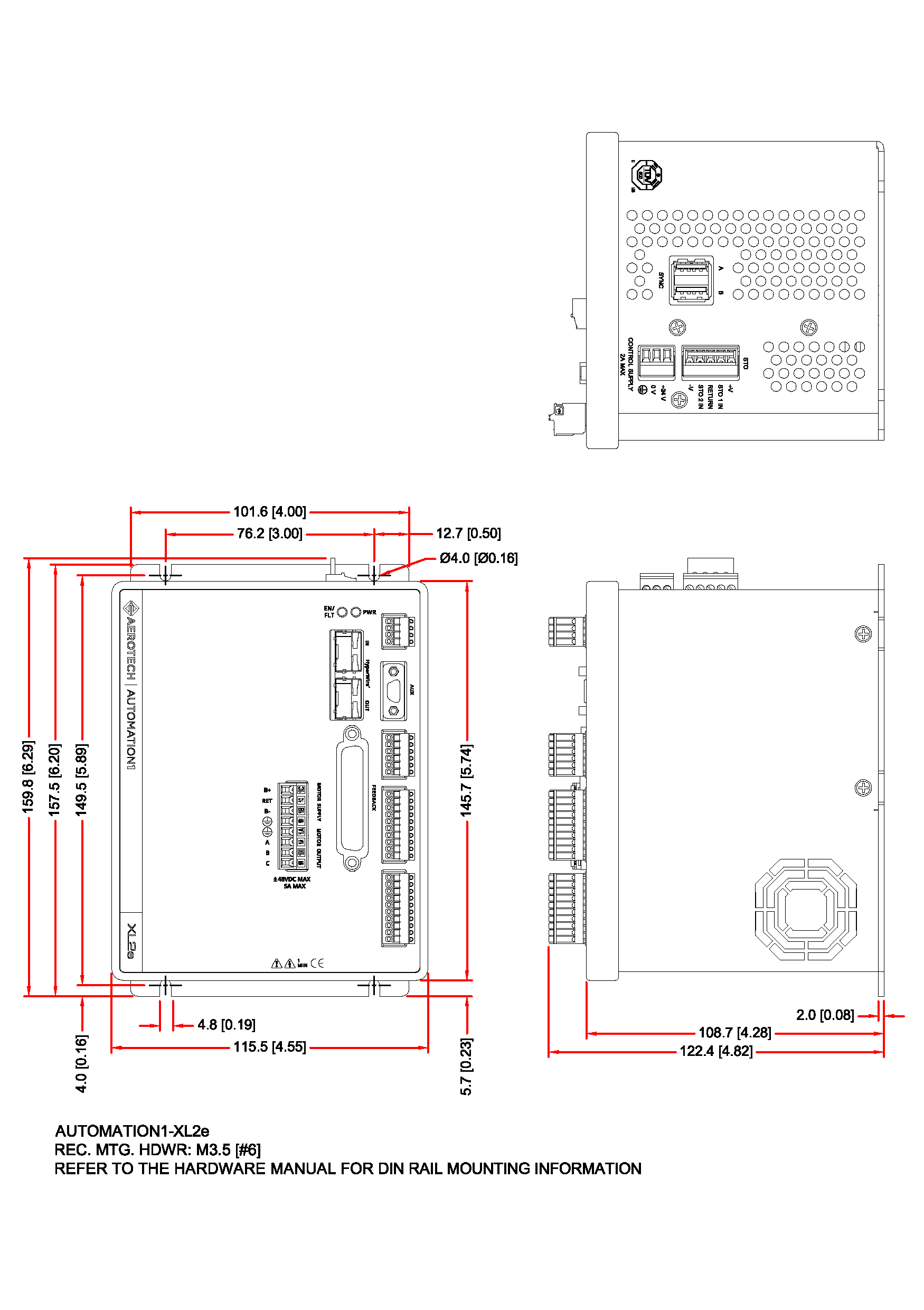
Dimensions
Automation1 XL2e, -EB0 Option
Automation1 XL2e, -EB1 Option
Ordering Information
Automation1-XL2e
| Option | Description |
| Automation1 XL2e | Enhanced, Compact Linear Servo Drive |
Peak Current
| Option | Description |
| -10 | 10 A Peak Current (Default) |
Expansion Board
| Option | Description |
| -EB0 | No Expansion Board (Default) |
| -EB1 | I/O Expansion Board |
Multiplier
| Option | Description |
| -MX0 | No Encoder Multiplier (Default) |
| -MX2 | 2 MHz/450 kHz x65536 Multiplier (Primary), No Multiplier (Auxiliary) |
| -MX3 | 2 MHz/450 kHz x65536 Multiplier (Primary), 450 KHz x16384 Multiplier (Auxiliary)* |
- *-MX3 requires the -EB1 option
PSO*
| Option | Description |
| -PSO1 | One-Axis PSO (includes One-Axis Part-Speed PSO) (Default) |
| -PSO2 | Two-Axis PSO (includes Two-Axis Part-Speed PSO) |
| -PSO3 | Three-Axis PSO (includes Three-Axis Part-Speed PSO0 |
| -PSO5 | Two-Axis Part-Speed PSO |
| -PSO6 | Three-Axis Part-Speed PSO |
- *Requires -EB1 option to generate a PSO output pulse