Automation1 XC4 PWM-Servoantrieb
Der digitale XC4-PWM-Antrieb ist ein leistungsstarker Einzelachs-Motorantrieb, der für Motion-Control-Anwendungen entwickelt wurde. Alle Versionen sind kompatibel mit den Motion-Plattformen Automation1 und Automation 3200, die den HyperWire® Motion-Bus nutzen. Die Verstärker steuern bürstenlose DC-, bürstenbehaftete DC-, Voice Coil- und Schrittmotortypen mit einer Betriebsspannung von bis zu 340 VDC und einem Spitzenstrom von 30 A.
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Description
Specifications
Dimensions
Ordering Info
Downloads
Description
Gestaltungsmerkmale
- Bestandteil der Automation1-Präzisions-Bewegungssteuerungsplattform von Aerotech
- Kompatibel mit A3200 Version 6.04 und neuer
- HyperWire®-Lichtwellenleiter-Schnittstelle
- Bis zu 30 A Spitzenausgangsstrom
- Integrale Spannungsversorgung
- Antrieb von Bürsten-, bürstenlosen, Schwingspulen- und Schrittmotoren
- Safe Torque Off (STO) Sicherheitsschaltung
- Antriebs-Array bestehend aus mehr als 4 Millionen 32-Bit-Elementen
- Inklusive einachsigem positionssynchronisiertem Ausgang (PSO)
- Optional zwei- oder dreiachsiger Part-Speed-PSO
- Optionales E/A-Erweiterungsboard
- Optionaler 16K-Gebermultiplikator für verstärkte Sinusgeber bis zu 2 MHz
- Hochauflösende digitale Strom-, Geschwindigkeits- und Positionsschleifen
- CE zugelassen, NRTL Sicherheitszertifizierung, EU 2015/863 RoHS 3 Richtlinie
Die Stromschleife und der Servoregelkreis werden digital geschlossen, um ein Höchstmaß an Positioniergenauigkeit und Ratenstabilität zu gewährleisten. Dies ermöglicht Schleifenschlussraten von bis zu 20 kHz und erlaubt digitale und analoge E/A-Verarbeitung, Datenerfassung, Prozesssteuerung und Encoder-Multiplikationsaufgaben in Echtzeit.
Sehen Sie, wie Automation1-Servoantriebe die In-Position-Stabilität verbessern.
Zu den Standardfunktionen des XC4 gehören Safe Torque Off (STO), ein Datenarray mit über 4 Millionen 32-Bit-Elementen, digitale und analoge E/A (siehe Tabelle), ein einachsiger positionssynchronisierter Ausgang (PSO), dedizierte Eingänge für den Referenzpunkt und das Ende des Verfahrwegs sowie eine erweiterte Strommessvorrichtung. Die Geberunterstützung umfasst Rechteck-, Sinus- und Absolutwertgeber.
>
Der Standard-XC4 akzeptiert Rechteck-Encoder-Feedback mit einer Rate von bis zu 40 Millionen Zählungen pro Sekunde. Sinus-Encoder können mit dem optionalen Encoder-Multiplikator mit bis zu 16.384 multipliziert werden, was eine hochauflösende Positionsrückmeldung ermöglicht.
Jeder einachsige XC4-PWM-Digitalantrieb verfügt über eine optionale E/A-Erweiterungsplatine, die die Anzahl der E/A-Punkte deutlich erhöht. Diese E/A-Platine enthält einen dedizierten PSO-Ausgang und einen PSO-Synchronisationseingang, der häufig zur Synchronisierung der Prozesssteuerung mit einem externen modemgekoppelten Frequenzeingang verwendet wird.
Specifications |
-10, -20, -30 |
| Motor Style | Brush, brushless, voice coil, stepper_1 |
| Motor Supply | Single-phase 0-240 VAC 50/60 Hz |
| Control Supply | 100-240 VAC 50/60 Hz |
| Bus Voltage_2 | 0-340 VDC |
| Peak Output Current (1 sec)_3 | -10: 10 Apk -20: 20 Apk -30: 30 Apk |
| Continuous Output Current(3)(4) | -10: 5 Apk -20: 10 Apk -30: 10 Apk |
| Position Synchronized Output (PSO) | Standard: One-axis PSO (includes one-axis part-speed PSO)(5) Optional: Three-axis part-speed PSO |
| 25-Pin Motor Feedback Connector | - High-speed differential inputs (encoder sin, cos and marker) - CW and CCW limits - Hall effect sensor inputs (A, B, and C) - Analog motor temperature input (accepts digital) - Brake output |
| 26-Pin Auxiliary Feedback Connector | - High-speed differential inputs (encoder sin, cos and marker)* - 4x optically isolated digital inputs - 4x optically isolated digital outputs - 1x 16-bit differential ±10 V analog input - 1x 16-bit single-ended ±10 V analog output - 2x optically isolated high-speed inputs *This channel is bidirectional, and can be used to echo out encoder signal |
| Multiplier Options | MX0 Option: Primary Encoder: 40 million counts per second square-wave input. Auxiliary Encoder: 40 million counts per second square-wave input. MX1 Option: Primary Encoder: 2 MHz / 450 kHz (bandwidth selectable) sine-wave input, encoder multiplier up to x16,384* Auxiliary Encoder: 40 million counts per second square-wave input *Encoders multiplied with this input cannot be echoed out. |
| I/O Expansion Board (-EB1) | - 1x additional PSO connection point - 1x PSO synchronization Input - 16x digital inputs, optically isolated - 16x digital outputs, optically isolated - 3x analog inputs, 16-bit, differential, ±10 V - 3x analog outputs, 16-bit, single-ended, ±10 V |
| Drive Array Memory | 16.8 MB (4,194,304 32-bit elements) |
| High Speed Data Capture | Yes (50 ns latency) |
| Safe Torque Off (STO) | Yes, SIL3/PLe/Cat 4 |
| HyperWire Connections | 2x HyperWire small form-factor pluggable (SFP) ports |
| Automatic Brake Control | Standard; 24 V at 1 A |
| Absolute Encoder | Renishaw resolute BiSS; EnDat 2.1; and EnDat 2.2 |
| Current Loop Update Rate | 20 kHz |
| Servo Loop Update Rate | 20 kHz |
| Power Amplifier Bandwidth | Selectable through software (85-95% efficiency) |
| Minimum Load Inductance | 0.1 mH |
| Operating Temperature | 0 to 40 °C |
| Storage Temperature | -30 to 85 °C |
| Weight | 2.36 kg (5.20 lb.) |
| Compliance | CE approved, NRTL safety certification, EU 2015/863 RoHS 3 directive |
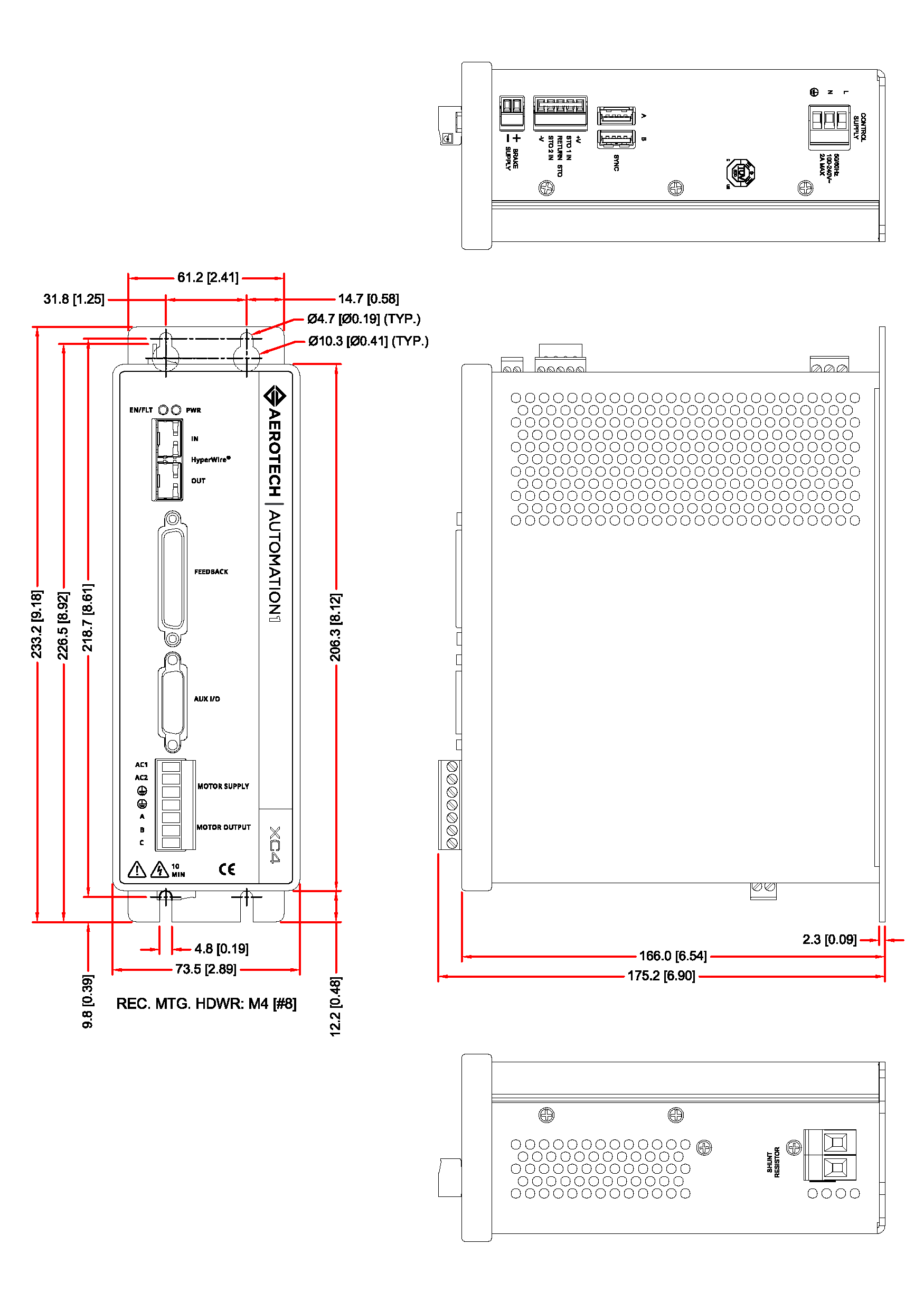
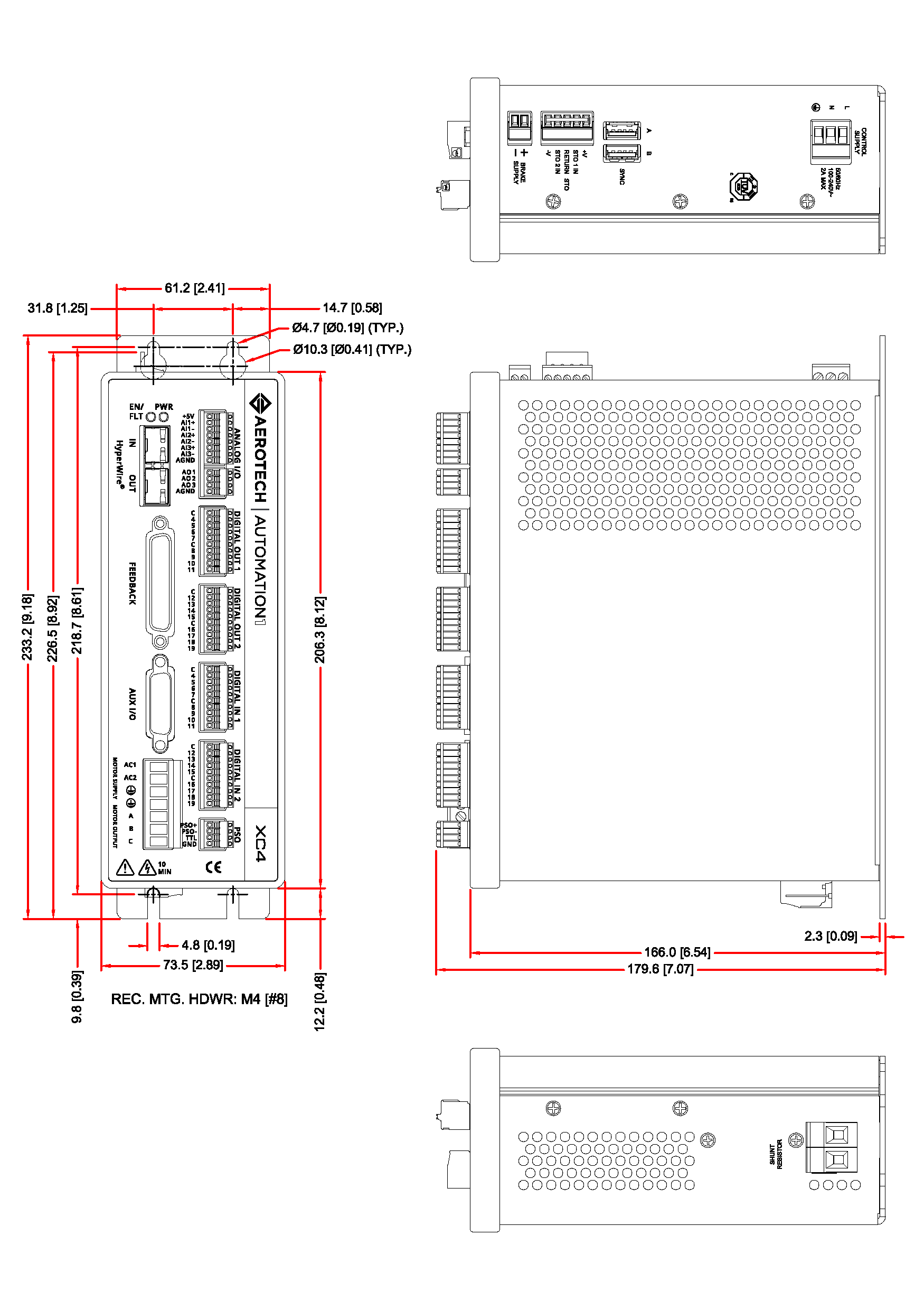
Dimensions
Automation1 XC4, -EB0 Option
Automation1 XC4, -EB1 Option
Ordering Information
XC4
| Option | Description |
| XC4 | XC4 PWM digital drive |
Peak Current
| Option | Description |
| -10 | 10 A peak, 5 A cont. current (default) |
| -20 | 20 A peak, 10 A cont. current |
| -30 | 30 A peak, 10 A cont. current |
Expansion Board
| Option | Description |
| -EB0 | No expansion board |
| -EB1 | IO expansion board |
Multiplier
| Option | Description |
| -MX0 | No encoder board (default) |
| -MX1 | 2 MHz / 450 kHz (bandwidth selectable) x16384 multiplier (primary), no multiplier (auxiliary) |
PSO
| Option | Description |
| -PSO1(1) | One-axis PSO (includes One-axis Part-Speed PSO) (Default) |
| -PSO6 | Three-axis Part-Speed PSO |
- 1. Encoder feedback-based PSO requires the -MX0 multiplier option.
External Shunt
| Option | Description |
| -SX0 | No 2-pin connector for external shunt (default) |
| -SX1 | 2-pin connector for external shunt |